|
|
|
|
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Mike Miller" <mil### [at] gmail com> wrote:
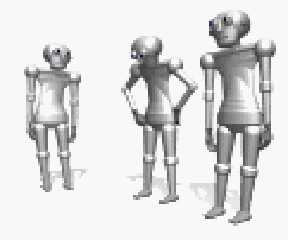
> Rendering of a poseable wood mannequin. Modeled for my Jack/workbench scene. I
> posted the scene file. Most pivots are programmed with 2 rotations. The upper
> arm could use an additional y rotation. The include file could use some
> additional commenting and poses. Might try to work out a run sequence.
> Miller
Nice!
My first thought was that it looked like it came out of my old Quantum Robots
code. After reading your text I knew it didn't. Then 'I could have done that if
I
wanted to.'
A long time ago I went robot crazy. So I made a robot factory, with a few window
programs to help set some(well a lot) reusable poses. I used those poses as
keyframes in my animations. The thing is I made a lot of walking/running
animations. I could give the keyframe poses to ya if it would help.
I used the full 3 element rotate.
So a lot of conversion would have to be done :(
Have Fun! com> wrote:
> Rendering of a poseable wood mannequin. Modeled for my Jack/workbench scene. I
> posted the scene file. Most pivots are programmed with 2 rotations. The upper
> arm could use an additional y rotation. The include file could use some
> additional commenting and poses. Might try to work out a run sequence.
> Miller
Nice!
My first thought was that it looked like it came out of my old Quantum Robots
code. After reading your text I knew it didn't. Then 'I could have done that if
I
wanted to.'
A long time ago I went robot crazy. So I made a robot factory, with a few window
programs to help set some(well a lot) reusable poses. I used those poses as
keyframes in my animations. The thing is I made a lot of walking/running
animations. I could give the keyframe poses to ya if it would help.
I used the full 3 element rotate.
So a lot of conversion would have to be done :(
Have Fun!
Post a reply to this message
Attachments:
Download 'robot.gif' (54 KB)
Preview of image 'robot.gif'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Leroy" <whe### [at] gmailcom> wrote:
> "Mike Miller" <mil### [at] gmailcom> wrote:
> > Rendering of a poseable wood mannequin. Modeled for my Jack/workbench scene. I
> > posted the scene file. Most pivots are programmed with 2 rotations. The upper
> > arm could use an additional y rotation. The include file could use some
> > additional commenting and poses. Might try to work out a run sequence.
> > Miller
>
> Nice!
> My first thought was that it looked like it came out of my old Quantum Robots
> code. After reading your text I knew it didn't. Then 'I could have done that if
> I
> wanted to.'
> A long time ago I went robot crazy. So I made a robot factory, with a few window
> programs to help set some(well a lot) reusable poses. I used those poses as
> keyframes in my animations. The thing is I made a lot of walking/running
> animations. I could give the keyframe poses to ya if it would help.
> I used the full 3 element rotate.
> So a lot of conversion would have to be done :(
>
> Have Fun!
>> I could give the keyframe poses to ya if it would help.
That would be great - I would love to see how the poses are handled. A biped
format that could be applied to any rigged character could be fun to program. :)
Mike
just a thought...I have Max and tons of .bip files. I should be able to write
the rotation keys out as a frame sequence - one .inc file per frame? A 4 second
animation would be 120 include files. :(
>> I used the full 3 element rotate.
That seems to work best for linked forward rotations...unless there's
a way to handle quaternions in POV. I need to go back and add 3 independent
rotations per joint. I got lazy.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Il 18/04/2023 03:23, Mike Miller ha scritto:
>
> Nice, thanks. I have to take a peek at his code. It looks very close to the same
> wood mannequin I have beside me. Don't have the female version. I just added the
> screws at the ball joints. My physical mannequin has brass screws.
> Mike.
The scene starts to get really impressive.
A lot of work!
Paolo
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Mike Miller" <mil### [at] gmailcom> wrote:
> "Leroy" <whe### [at] gmailcom> wrote:
> > "Mike Miller" <mil### [at] gmailcom> wrote:
> > > Rendering of a poseable wood mannequin. Modeled for my Jack/workbench scene. I
> > > posted the scene file. Most pivots are programmed with 2 rotations. The upper
> > > arm could use an additional y rotation. The include file could use some
> > > additional commenting and poses. Might try to work out a run sequence.
> > > Miller
> >
> > Nice!
> > My first thought was that it looked like it came out of my old Quantum Robots
> > code. After reading your text I knew it didn't. Then 'I could have done that if
> > I
> > wanted to.'
> > A long time ago I went robot crazy. So I made a robot factory, with a few window
> > programs to help set some(well a lot) reusable poses. I used those poses as
> > keyframes in my animations. The thing is I made a lot of walking/running
> > animations. I could give the keyframe poses to ya if it would help.
> > I used the full 3 element rotate.
> > So a lot of conversion would have to be done :(
> >
> > Have Fun!
>
> >> I could give the keyframe poses to ya if it would help.
> That would be great - I would love to see how the poses are handled. A biped
> format that could be applied to any rigged character could be fun to program. :)
> Mike
>
> just a thought...I have Max and tons of .bip files. I should be able to write
> the rotation keys out as a frame sequence - one .inc file per frame? A 4 second
> animation would be 120 include files. :(
What I did is use one file with all the Key frames names and their frame numbers
then read that file. some like
1,"pose1.rbp"
5,"pose2.rbp"
15,"pose3.rbp"
When you read that file you check to see if the frame number in the file is
equal to or greater than what the animation frame is.
If it is greater than then read the next line and interpolate between the two.
>
> >> I used the full 3 element rotate.
> That seems to work best for linked forward rotations...unless there's
> a way to handle quaternions in POV. I need to go back and add 3 independent
> rotations per joint. I got lazy.
Here they are the poses and a win program to view them
Post a reply to this message
Attachments:
Download 'millerpng.zip' (159 KB)
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Leroy" <whe### [at] gmailcom> wrote:
> "Mike Miller" <mil### [at] gmailcom> wrote:
> > "Leroy" <whe### [at] gmailcom> wrote:
> > > "Mike Miller" <mil### [at] gmailcom> wrote:
> > > > Rendering of a poseable wood mannequin. Modeled for my Jack/workbench scene. I
> > > > posted the scene file. Most pivots are programmed with 2 rotations. The upper
> > > > arm could use an additional y rotation. The include file could use some
> > > > additional commenting and poses. Might try to work out a run sequence.
> > > > Miller
> > >
> > > Nice!
> > > My first thought was that it looked like it came out of my old Quantum Robots
> > > code. After reading your text I knew it didn't. Then 'I could have done that if
> > > I
> > > wanted to.'
> > > A long time ago I went robot crazy. So I made a robot factory, with a few window
> > > programs to help set some(well a lot) reusable poses. I used those poses as
> > > keyframes in my animations. The thing is I made a lot of walking/running
> > > animations. I could give the keyframe poses to ya if it would help.
> > > I used the full 3 element rotate.
> > > So a lot of conversion would have to be done :(
> > >
> > > Have Fun!
> >
> > >> I could give the keyframe poses to ya if it would help.
> > That would be great - I would love to see how the poses are handled. A biped
> > format that could be applied to any rigged character could be fun to program. :)
> > Mike
> >
> > just a thought...I have Max and tons of .bip files. I should be able to write
> > the rotation keys out as a frame sequence - one .inc file per frame? A 4 second
> > animation would be 120 include files. :(
>
> What I did is use one file with all the Key frames names and their frame numbers
> then read that file. some like
> 1,"pose1.rbp"
> 5,"pose2.rbp"
> 15,"pose3.rbp"
> When you read that file you check to see if the frame number in the file is
> equal to or greater than what the animation frame is.
> If it is greater than then read the next line and interpolate between the two.
>
>
> >
> > >> I used the full 3 element rotate.
> > That seems to work best for linked forward rotations...unless there's
> > a way to handle quaternions in POV. I need to go back and add 3 independent
> > rotations per joint. I got lazy.
>
> Here they are the poses and a win program to view them
Thank you for sharing. I've pulled it down and will get back with you
soon....I'm suck in the minutia of my current scene.
Mike
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Mike Miller" <mil### [at] gmailcom> wrote:
>
> Thank you for sharing. I've pulled it down and will get back with you
> soon....I'm suck in the minutia of my current scene.
> Mike
Sorry, I forgot to give you the key to how angles are saved ande read.
Here it is.
#fopen Mfile Bos read // body
#read (Mfile Reff1) "angle limits"
#read (Mfile LlegHA1) // right Higher leg -40<x<130 -5<z<80
#read (Mfile LlegLA1) // right lower leg 0< x< -151
#read (Mfile LFootHA1) // right higher Foot -40<x<20 -40<y<15
#read (Mfile LToesA1) // right toes
#read (Mfile LharmA1) // right High arm
#read (Mfile LlarmA1) // right lower arm 0<x< 150
#read (Mfile LhandA1) // right hand -40<x<20 y<+-90 -90<z<30
#read (Mfile HeadA1) // head x<+-30 y<+-60 z<+-40
#read (Mfile NeckA1) // Neck same limits as head
#read (Mfile BodA1) // body -110<x<30 y<+-30 z<+-10
#read (Mfile ButtA1) // butt -30<x<110 y<+-30 z<+-10
#read (Mfile RlegHA1) // left Higher leg -40<x<130 -80<z<5
#read (Mfile RlegLA1) // left lower leg 0<x<-150
#read (Mfile RFootHA1) // left higher Foot -40<x<20 -15<y<40
#read (Mfile RToesA1) // left toes 0<x<90
#read (Mfile RharmA1) // Left High arm Pattern
#read (Mfile RlarmA1) // left lower arm 0<x< -150
#read (Mfile RhandA1) // left hand -40<x<20 y<+-90 -30<z<90
#read (Mfile Bline1) // free vector
Have fun.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Mike Miller" <mil### [at] gmailcom> wrote:
> Thanks Colin. I've pulled in the files. Cool that most the mannequin forms are
> modeled with a sphere/cylinder blob pairing.
> Mike.
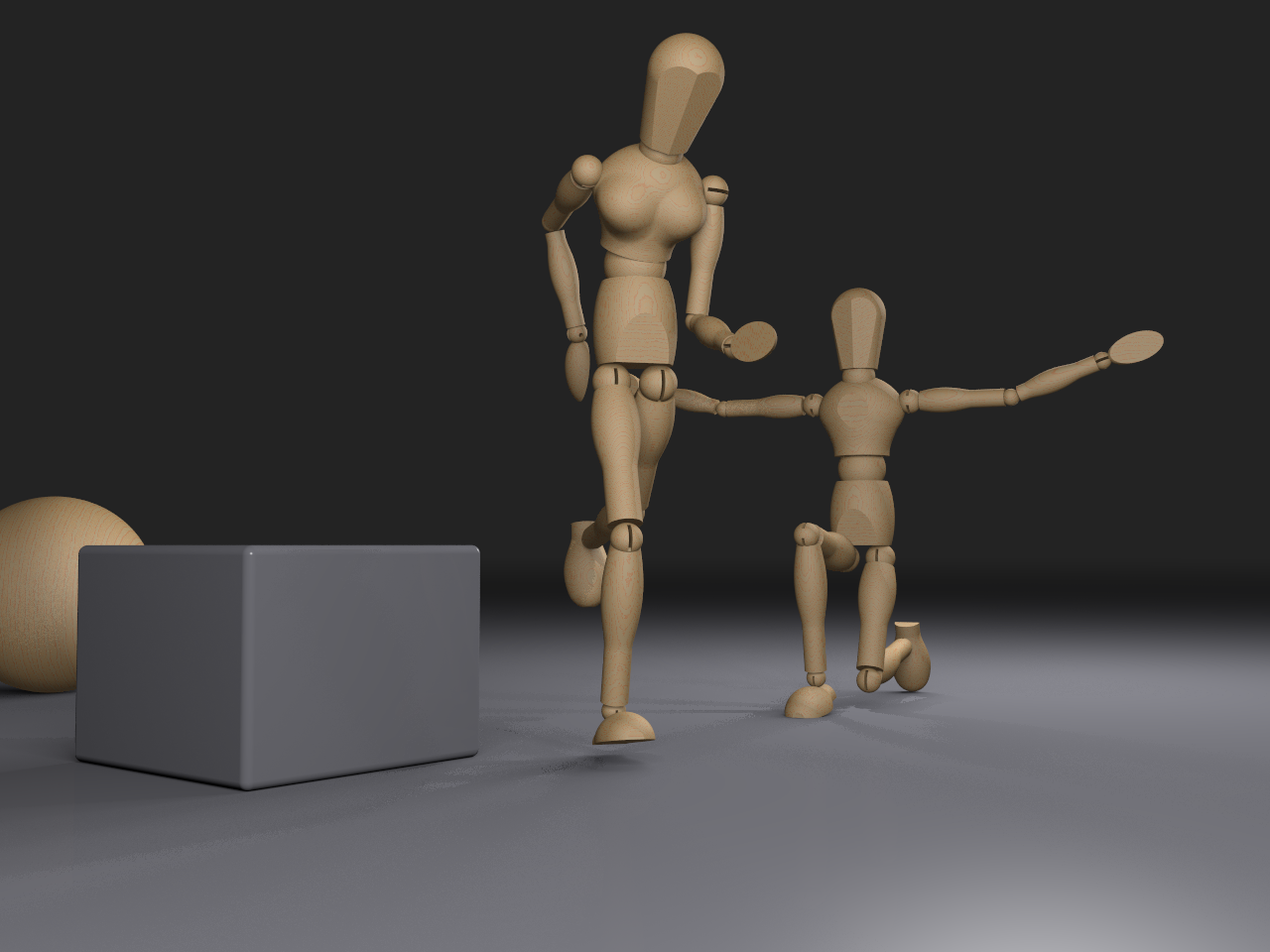
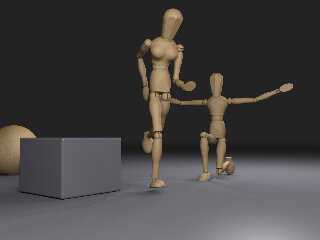
Hi Mike,
I like Fabiens mannequin include file because it was simple, using spheres and
blobs made it easier for me to understand!
I made a slight modification to Fabiens mannequin include file, added the option
for either male or female then added an 'if' statement in the declared 'buste'
object, pretty simple. Changing the pose of the mannequin is trial an error,
but as you've shown in your mannequin include file, declaring the variables
first makes it a lot easier.
Colin.
Post a reply to this message
Attachments:
Download 'fm_mannequin.png' (475 KB)
Preview of image 'fm_mannequin.png'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Colin Fleming" <Colin Fleming> wrote:
> "Mike Miller" <mil### [at] gmailcom> wrote:
>
> > Thanks Colin. I've pulled in the files. Cool that most the mannequin forms are
> > modeled with a sphere/cylinder blob pairing.
> > Mike.
>
> Hi Mike,
>
> I like Fabiens mannequin include file because it was simple, using spheres and
> blobs made it easier for me to understand!
>
> I made a slight modification to Fabiens mannequin include file, added the option
> for either male or female then added an 'if' statement in the declared 'buste'
> object, pretty simple. Changing the pose of the mannequin is trial an error,
> but as you've shown in your mannequin include file, declaring the variables
> first makes it a lot easier.
>
> Colin.
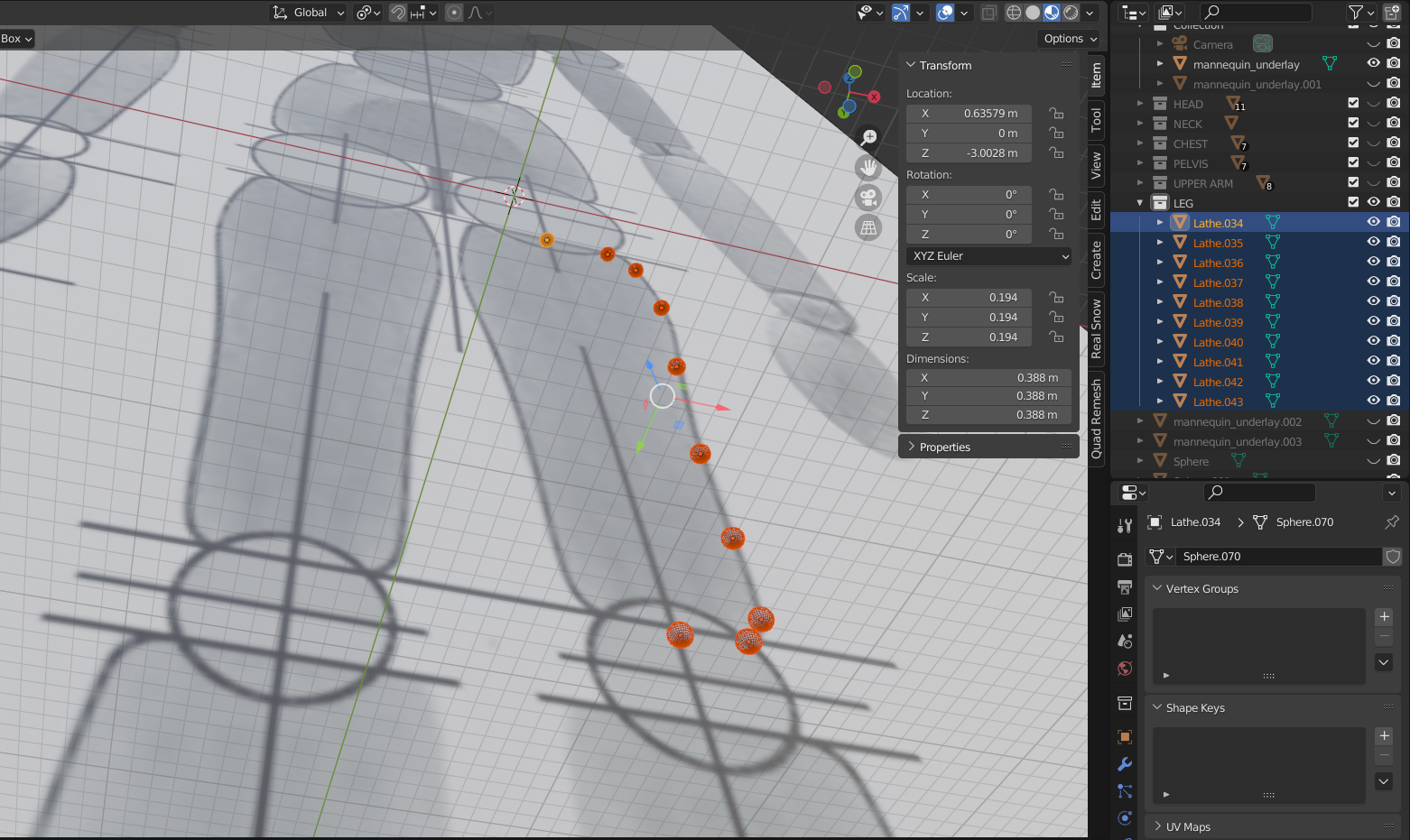
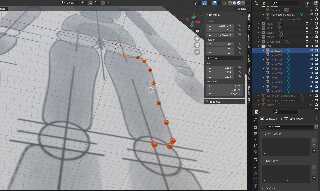
Thanks Colin. I agree, blobs are probably a better way to model these forms. I
modeled over an underlay in blender and exported the lathe cubic splines as POV
syntax - it gives me good accuracy. Wish Blender had cylinder blobs. :)
Mike.
Post a reply to this message
Attachments:
Download 'blender_cap.png' (1092 KB)
Preview of image 'blender_cap.png'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Mike Miller" <mil### [at] gmailcom> wrote:
> "Colin Fleming" <Colin Fleming> wrote:
> > "Mike Miller" <mil### [at] gmailcom> wrote:
> >
> > > Thanks Colin. I've pulled in the files. Cool that most the mannequin forms are
> > > modeled with a sphere/cylinder blob pairing.
> > > Mike.
> >
> > Hi Mike,
> >
> > I like Fabiens mannequin include file because it was simple, using spheres and
> > blobs made it easier for me to understand!
> >
> > I made a slight modification to Fabiens mannequin include file, added the option
> > for either male or female then added an 'if' statement in the declared 'buste'
> > object, pretty simple. Changing the pose of the mannequin is trial an error,
> > but as you've shown in your mannequin include file, declaring the variables
> > first makes it a lot easier.
> >
> > Colin.
>
> Thanks Colin. I agree, blobs are probably a better way to model these forms. I
> modeled over an underlay in blender and exported the lathe cubic splines as POV
> syntax - it gives me good accuracy. Wish Blender had cylinder blobs. :)
> Mike.
....mistake >> blender has a capsule blob but doesn't translate through the .x3D
format correctly. Have not been able to use.
Mike.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Mike Miller" <mil### [at] gmailcom> wrote:
> "Mike Miller" <mil### [at] gmailcom> wrote:
> > "Colin Fleming" <Colin Fleming> wrote:
> > > "Mike Miller" <mil### [at] gmailcom> wrote:
> > >
> > > > Thanks Colin. I've pulled in the files. Cool that most the mannequin forms are
> > > > modeled with a sphere/cylinder blob pairing.
> > > > Mike.
> > >
> > > Hi Mike,
> > >
> > > I like Fabiens mannequin include file because it was simple, using spheres and
> > > blobs made it easier for me to understand!
> > >
> > > I made a slight modification to Fabiens mannequin include file, added the option
> > > for either male or female then added an 'if' statement in the declared 'buste'
> > > object, pretty simple. Changing the pose of the mannequin is trial an error,
> > > but as you've shown in your mannequin include file, declaring the variables
> > > first makes it a lot easier.
> > >
> > > Colin.
> >
> > Thanks Colin. I agree, blobs are probably a better way to model these forms. I
> > modeled over an underlay in blender and exported the lathe cubic splines as POV
> > syntax - it gives me good accuracy. Wish Blender had cylinder blobs. :)
> > Mike.
>
> ....mistake >> blender has a capsule blob but doesn't translate through the .x3D
> format correctly. Have not been able to use.
> Mike.
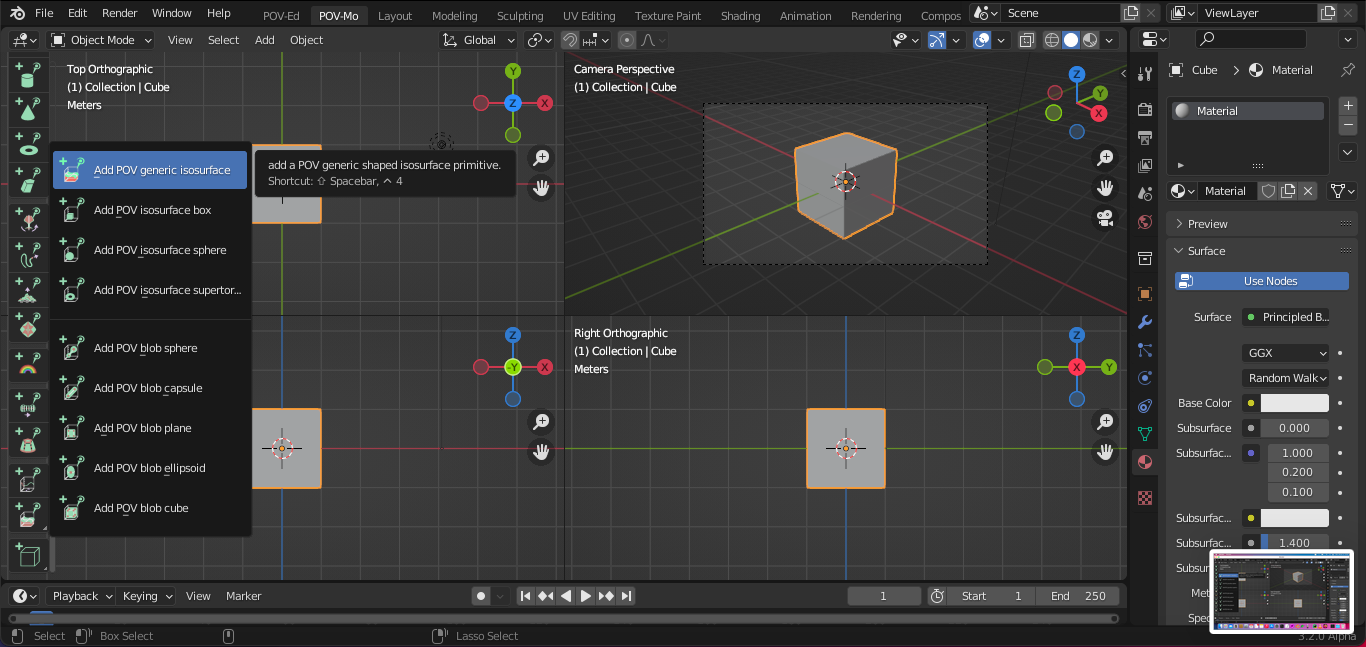
The POV addon features all blob shapes under isosurfaces, because they are.
indeed capsule is the cylinder and should export to pov as such.
Post a reply to this message
Attachments:
Download 'blobsui.png' (428 KB)
Preview of image 'blobsui.png'

|
|
| |
| |
|
|
|
|
| |