|
|
|
|
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Hello,
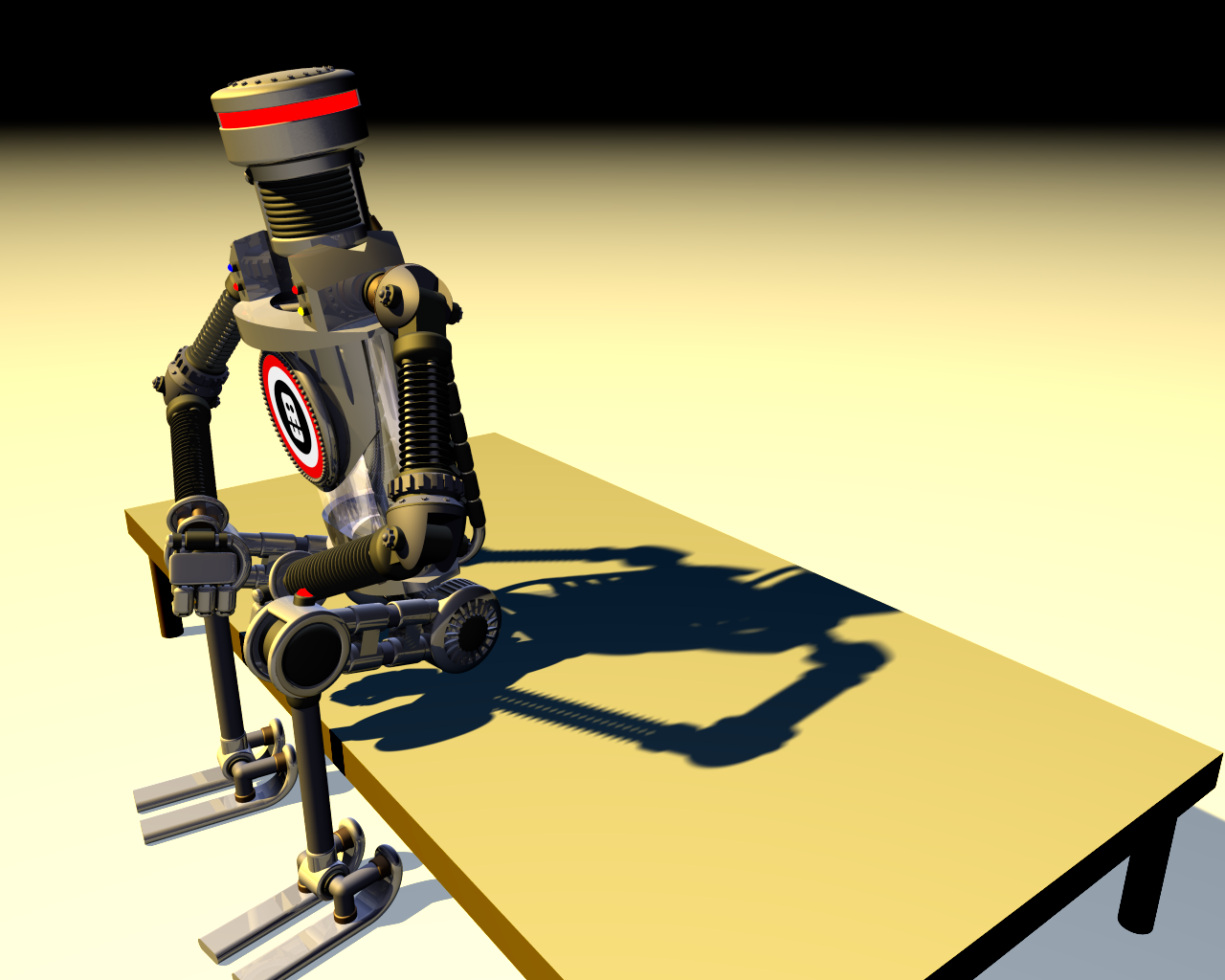
Here's my five-yearly post on how the CSG robot is coming along. ;)
I'm thinking of open sourcing the code but it'll take me a bit of work to
document how the posing system works (it's a very clunky forward kinematics
thing) so you might have to wait until I'm in the mood or not worn out after
coming home from work. :)
Best,
Alan.
Post a reply to this message
Attachments:
Download 'robot.jpg.png' (362 KB)
Preview of image 'robot.jpg.png'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
On 30-8-2012 21:31, Alan Holding wrote:
> Hello,
>
> Here's my five-yearly post on how the CSG robot is coming along. ;)
>
> I'm thinking of open sourcing the code but it'll take me a bit of work to
> document how the posing system works (it's a very clunky forward kinematics
> thing) so you might have to wait until I'm in the mood or not worn out after
> coming home from work. :)
>
Looking very good indeed.
What is the advantage of forward kinematics over inverse kinematics,
which is the usual way? (just curious).
Thomas
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Thomas de Groot wrote:
> What is the advantage of forward kinematics over inverse kinematics,
> which is the usual way? (just curious).
inverse kinematics are much more effort to implement. Basically in
POV Ray terms you are doing forward kinematics all the time when you
say something like {object ARM rotate 30*x}. Inverse kinematics means
specifying where the hand should be and then automatically calculating
the required rotations for all joints along the way.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
On 1-9-2012 14:35, Christian Froeschlin wrote:
> Thomas de Groot wrote:
>
>> What is the advantage of forward kinematics over inverse kinematics,
>> which is the usual way? (just curious).
>
> inverse kinematics are much more effort to implement. Basically in
> POV Ray terms you are doing forward kinematics all the time when you
> say something like {object ARM rotate 30*x}. Inverse kinematics means
> specifying where the hand should be and then automatically calculating
> the required rotations for all joints along the way.
OK. However (talking from memory when I used IK with Moray) the
advantage of IK is that you can position, say, the hand, and the arm and
upper body will follow (if you have written the code correctly), which
seems easier to me than starting from the upper body and going down to
the hand. Well, in this particular case of course. For weaving reed
stems for instance, I would prefer FK, or for just moving an arm + hand.
IK can be used in Poser too, by physically moving e.g. a hand to a
wanted position, everything else following smoothly. Often very tricky
to do, I must confess.
Thomas
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Thomas de Groot <tho### [at] degroot org> wrote:
> Looking very good indeed.
Thank you.
> What is the advantage of forward kinematics over inverse kinematics,
> which is the usual way? (just curious).
The advantage for me is forward kinematics is easier to script. I'm not very
clever, maths-wise, you see.
Been a long time since I looked at scripting inverse kinematics as it made my
brain hurt the first time round. Maybe I should try again. :) org> wrote:
> Looking very good indeed.
Thank you.
> What is the advantage of forward kinematics over inverse kinematics,
> which is the usual way? (just curious).
The advantage for me is forward kinematics is easier to script. I'm not very
clever, maths-wise, you see.
Been a long time since I looked at scripting inverse kinematics as it made my
brain hurt the first time round. Maybe I should try again. :)
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Impressive!
Nice "technical" details everywhere.
One minor possible problem: it SEEMS as if the lamp (?) on his/it's left knee is
partially inside his/it's left arm ?!
Have a nice weekend ...
Karl
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
On 30/08/12 21:31, Alan Holding wrote:
> Hello,
>
> Here's my five-yearly post on how the CSG robot is coming along. ;)
Not that bad pace, but could be better... :)
I love the pose, melancholic robots are always adorable.
--
Jaime
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Karl Anders" <kar### [at] webde> wrote:
> Impressive!
> Nice "technical" details everywhere.
Thank you.
> One minor possible problem: it SEEMS as if the lamp (?) on his/it's left knee is
> partially inside his/it's left arm ?!
Yes, you're right. I'll pay more attention with the posing from now on.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
On 2-9-2012 10:18, Jaime Vives Piqueres wrote:
> I love the pose, melancholic robots are always adorable.
How true.
Thomas
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |