Just thought I'd share my thoughts on leg simulation:
I have tried to do a full inverse kinematic simulation in pov-ray - not
suprisingly, it didn't succeed very well. Professional IK algorithms have
quite complex methods to use up the free degrees of freedom in a 'sensible'
way, which would be quite hard/slow to implement in pov-ray script.
An approximation I thought of is that rarely does the motion of the leg
while it's in the air have to be absolutely accurately controlled. If
vertical movement is ignored, the problem is then reduced to a 2D one. The
next simplification was that for most legs, one degree of movement is only
available at the 'hip' - e.g. in our own legs, sideways movement can only
occur at the hip. A simple rotation of the leg about the hip can therefore
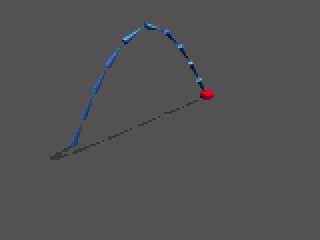
be done to convert it into a 1D problem. An appropriate curve (e.g. a
parabola) of the correct length can be found analytically. See attached for
an example.
The height can then be controlled approximately by just adding a small
amount to the angle of each joint. This works best with many-segmented legs,
so Guenter's method may well be best for his particular application.
-Chris
Post a reply to this message
Attachments:
Download 'ik.gif' (31 KB)
Preview of image 'ik.gif'
|