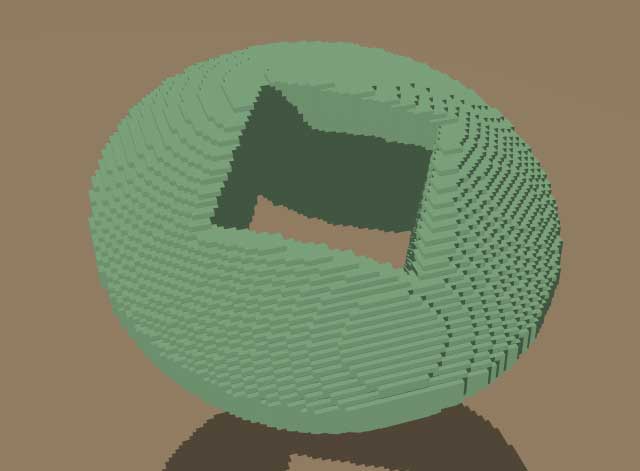
My first csg test showing the bounding boxes that I'll use for efficient
cloth-solid collission detection. Only those parts of the cloth that are
inside one of those boxes have a chance of interacting with the (csg) solid
object.
The thing 'understands' the pov objects 'sphere' and 'box' and 'merge,
difference, intersection' and the transformations 'scale', 'rotate', and
'translate'. I you folks think it's a good thing adding some extras like
'shear' is very easy. But at this moment I'm still working on 'torus',
'cone' and 'cylinder'.
Next step is getting the code working that determines the csg's normal
vectors efficiently... :-(
--
Apache
http://geitenkaas.dns2go.com/experiments/
apa### [at] yahoo com com
Post a reply to this message
Attachments:
Download 'cloth071csgtest01.jpg' (16 KB)
Preview of image 'cloth071csgtest01.jpg'
|