|
|
|
|
|
|
| |
| |
|
|
|
|
| |
| |
|
|
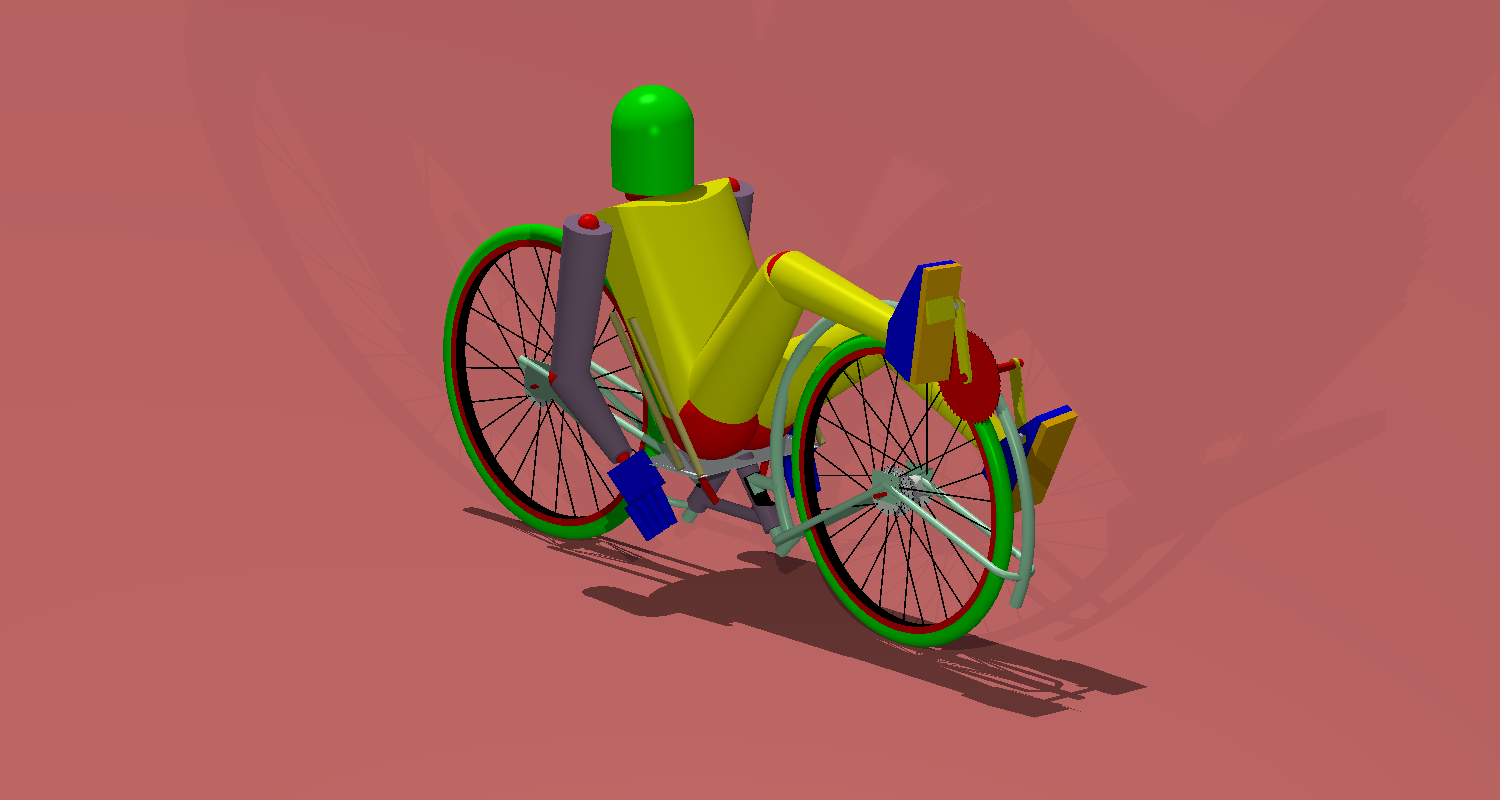
Here an image of the bike I plan to build. Mostly parametric description.
Modelisation done with Pycao, using between 200 and 300 lines of code ( not
including the many parameters at the beginning of the file)
Thank you Povray and the povray team :-)
Post a reply to this message
Attachments:
Download 'essai.png' (143 KB)
Preview of image 'essai.png'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
On 9/14/2016 8:45 PM, lelama wrote:
> Here an image of the bike I plan to build. Mostly parametric description.
> Modelisation done with Pycao, using between 200 and 300 lines of code ( not
> including the many parameters at the beginning of the file)
>
A hard man. No padding on the seat?
Nice job on the model. :)
--
Regards
Stephen
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
> Here an image of the bike I plan to build. Mostly parametric description.
> Modelisation done with Pycao, using between 200 and 300 lines of code ( not
> including the many parameters at the beginning of the file)
>
> Thank you Povray and the povray team :-)
>
>
Nice... but, I see some problems on the mechanical and functional point:
1) The handles are in an awkward location. Located like that, you lack
leverage in your steering.
2) Normally, the chain goes to the rear wheel. How do you plan on
routing it? As it is now, it can hardly go there without interfering
with the front wheel and it can't bend laterally. Maybe it's a front
wheel drive? You really don't want the pedals to turn with the front wheel.
3) How does the front wheel can ever turn in order to steer? If the
pivot is under the pilot, it will be insanely difficult to go straight
if there are any irregularity on the road, and any curve will be
uncontrollable. Then, here is the problem of the chain that can't bend.
4) If the pedals turn with the front wheel, pedalling will make you turn
to the right and left. As they will have a MUCH longer lever than the
hands, you'll be powerless to control that.
5) The front wheel's pivot axis projection reach the ground behind the
wheel's contact point, it must be in front of that point.
My propositions:
Have a smaller front wheel, about half the size of the rear wheel.
Place the pivot for the front wheel further in front, over the wheel.
The projection of the pivot must reach the ground in front of the wheel
to insure driving stability.
Make it a rear drive bike.
If you want the handles to be under the seat, you need to make them
wider. Typically, they are placed slightly more forward and have an U shape.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Thanks Alain for the comments. The model here is a double steering bike, with
steering axis both for the front part and for the rear part. I already built
one. It was rideable (and fun :-) see this video :
https://www.youtube.com/watch?v=kP08CeD9aV8 ) but there were several points to
ameliorate.
The projection of the pivot may be behind the wheel ( google for python bikes to
see some models and for the explaination of stability - minimum of potential
energy with a centered wheel). And for double steering, it is probably
inevitable because positive trail yields to "wheel flop" difficult to control.
Alain <kua### [at] videotron ca> wrote:
> > Here an image of the bike I plan to build. Mostly parametric description.
> > Modelisation done with Pycao, using between 200 and 300 lines of code ( not
> > including the many parameters at the beginning of the file)
> >
> > Thank you Povray and the povray team :-)
> >
> >
>
> Nice... but, I see some problems on the mechanical and functional point:
> 1) The handles are in an awkward location. Located like that, you lack
> leverage in your steering.
>
> 2) Normally, the chain goes to the rear wheel. How do you plan on
> routing it? As it is now, it can hardly go there without interfering
> with the front wheel and it can't bend laterally. Maybe it's a front
> wheel drive? You really don't want the pedals to turn with the front wheel.
>
> 3) How does the front wheel can ever turn in order to steer? If the
> pivot is under the pilot, it will be insanely difficult to go straight
> if there are any irregularity on the road, and any curve will be
> uncontrollable. Then, here is the problem of the chain that can't bend.
>
> 4) If the pedals turn with the front wheel, pedalling will make you turn
> to the right and left. As they will have a MUCH longer lever than the
> hands, you'll be powerless to control that.
>
> 5) The front wheel's pivot axis projection reach the ground behind the
> wheel's contact point, it must be in front of that point.
>
>
> My propositions:
> Have a smaller front wheel, about half the size of the rear wheel.
> Place the pivot for the front wheel further in front, over the wheel.
> The projection of the pivot must reach the ground in front of the wheel
> to insure driving stability.
> Make it a rear drive bike.
> If you want the handles to be under the seat, you need to make them
> wider. Typically, they are placed slightly more forward and have an U shape. ca> wrote:
> > Here an image of the bike I plan to build. Mostly parametric description.
> > Modelisation done with Pycao, using between 200 and 300 lines of code ( not
> > including the many parameters at the beginning of the file)
> >
> > Thank you Povray and the povray team :-)
> >
> >
>
> Nice... but, I see some problems on the mechanical and functional point:
> 1) The handles are in an awkward location. Located like that, you lack
> leverage in your steering.
>
> 2) Normally, the chain goes to the rear wheel. How do you plan on
> routing it? As it is now, it can hardly go there without interfering
> with the front wheel and it can't bend laterally. Maybe it's a front
> wheel drive? You really don't want the pedals to turn with the front wheel.
>
> 3) How does the front wheel can ever turn in order to steer? If the
> pivot is under the pilot, it will be insanely difficult to go straight
> if there are any irregularity on the road, and any curve will be
> uncontrollable. Then, here is the problem of the chain that can't bend.
>
> 4) If the pedals turn with the front wheel, pedalling will make you turn
> to the right and left. As they will have a MUCH longer lever than the
> hands, you'll be powerless to control that.
>
> 5) The front wheel's pivot axis projection reach the ground behind the
> wheel's contact point, it must be in front of that point.
>
>
> My propositions:
> Have a smaller front wheel, about half the size of the rear wheel.
> Place the pivot for the front wheel further in front, over the wheel.
> The projection of the pivot must reach the ground in front of the wheel
> to insure driving stability.
> Make it a rear drive bike.
> If you want the handles to be under the seat, you need to make them
> wider. Typically, they are placed slightly more forward and have an U shape.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
|
|