|
|
|
|
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Bald Eagle" <cre### [at] netscape net> wrote:
> bool Sor::Intersect, line 239 in sor.cpp
>
> Line 276 has the interesting expression: r0 = P[X] * D[Z] - P[Z] * D[X];
> /* Get distance of the ray from rotation axis (= y axis). */
....
> Apparently it's a sort of 2D cross-product, or "perp-product"
....
> #if ((a = Dx * D.x + D.z * D.z) > 0.0)
> #local r0 = r0/sqrt(a);
> #end
OK, so r0 gets calculated by taking the vector cross product of
the PROJECTIONS of the ray origin and the ray direction (after they have been
translated into "object space")
[still hunting down how that Trans gets calculated, but I have an idea]
So, since they are projections onto the xz plane, y=0 for both vectors.
that means that two of the 2x2 determinants drop out due to multiplication by 0,
leaving only the one determinant to multiply by the y basis vector,
giving a y vector that is parallel to the 2 projected vectors.
Thus the shortened form P[X] * D[Z] - P[Z] * D[X]
However, in working this out, I had my vectors in different places in the
matrix, and so I got P[Z] * D[X] - P[X] * D[Z] which should just be the opposite
sign of the calculation in code. Not really a worry, since it's just a vector
cross product.
The potential problem that I see is the test that uses this value:
/* Test if ray misses object's bounds. */
#if (r0 > Radius2) // Radius2 is xmax of the sor CP's
#local Result = false;
#else
If the sign of the vector cross product is negative, then that rejection test
will always fail, and the ray will always move on to have the intersection
tested. Which, if I'm interpreting all of this correctly, means that all of
the rays on one side of the sor always get fully evaluated for intersections,
this potentially making rendering slower than it needs to be.
Shouldn't we be using at least abs (r0) to account for P-cross-D AND D-cross-P?
In more detail:
First we translate and then normalize the ray direction vector.
Then we test the ray to see if it is above or below the sor
as well as to the left or right of the sor
starting at line 266
if (((D[Y] >= 0.0) && (P[Y] > Height2)) ||
((D[Y] <= 0.0) && (P[Y] < Height1)) ||
((D[X] >= 0.0) && (P[X] > Radius2)) ||
((D[X] <= 0.0) && (P[X] < -Radius2)))
{
return(false);
}
Line 266 checks if the ray direction is flat or points up, and the ray origin is
higher than the highest sor control point (Height2 = ymax)
So it will never intersect the rotated sor spline
This is OK
Line 267 checks if the ray direction is flat or points down, and the ray origin
is lower than the lowest sor control point (Height1 = ymin)
So it will never intersect the rotated sor spline
This is OK
Line 268 checks if the ray direction is straight or points right, and the ray
origin is to the right of the rightmost sor control point (Radius2 = xmax)
So it will never intersect the rotated sor spline
This is OK
Line 269 checks if the ray direction is straight or points left, and the ray
origin is to the left of the leftmost (rotated) sor control point (-Radius2 =
-xmax)
So it will never intersect the rotated sor spline
This is OK
BW: since this is before we do any projection, and we're only testing height and
width, can't we have a slanted ray that WOULD intersect the sor spline once it
got rotated around the y-axis?
Then we are doing a calculation that purports to be the DISTANCE between the ray
and the y-axis.
Working that out from first principles, it is the geometric problem of
determining the perpendicular distance (the shortest distance) between a point
and a line.
We simplify this by projecting onto 2D since the vertical angle of the ray makes
no difference at this point.
The vector cross product of 2 vectors gives us the area of the parallelogram
defined by those 2 vectors (just use those 2 vectors to make the remaining 2
sides)
The area is also equal to the base times the height of the parallelogram, and so
we solve for the height (H), which is the perpendicular - and therefore the
shortest distance between the point (y-axis in the xz plane, <0, 0, 0>) and the
line (the ray composed of origin and unit directional vector)
That gives us LENGTH (P-cross-D) = H times LENGTH (D)
Rearranging gives us H = LENGTH (P-cross-D) / LENGTH (D)
Now, in code, we have
r0 = P.x * D.z - P.z * D.x;
and that is only multiplied by the y unit basis vector,
so since there are no other dimensional units, this directly evaluates to the
length of the perpendicular y vector, and we don't have to do the expensive
square root of the sum of the squares.
a is the squared length of the direction vector
which, if non-zero, the vector cross product length gets divided by,
which should be the shortest, perpendicular length.
A few minor problems.
The ray direction vector already gets normalized at the beginning of
Sor_Intersect, so why are we calculating it's length again, and then checking if
it's more than zero, when at this point it should always be ONE.
Which bring up the potential divide-by-zero error when the normalization
calculation is done - and there is NO checking THERE!
And then there is the vector cross product sign issue.
So, after this gets rigorously checked, I'd suggest that
1. the ray direction vector length check gets moved to earlier in the code
2. we can do away with recalculating the length, checking for non-zero length,
and dividing the vector cross product length by a ray length which should
already always be 1.
3. Line 276 r0 = P[X] * D[Z] - P[Z] * D[X];
should be r0 = fabs(P[X] * D[Z] - P[Z] * D[X]);
so that the "length" is always positive.
- BE net> wrote:
> bool Sor::Intersect, line 239 in sor.cpp
>
> Line 276 has the interesting expression: r0 = P[X] * D[Z] - P[Z] * D[X];
> /* Get distance of the ray from rotation axis (= y axis). */
....
> Apparently it's a sort of 2D cross-product, or "perp-product"
....
> #if ((a = Dx * D.x + D.z * D.z) > 0.0)
> #local r0 = r0/sqrt(a);
> #end
OK, so r0 gets calculated by taking the vector cross product of
the PROJECTIONS of the ray origin and the ray direction (after they have been
translated into "object space")
[still hunting down how that Trans gets calculated, but I have an idea]
So, since they are projections onto the xz plane, y=0 for both vectors.
that means that two of the 2x2 determinants drop out due to multiplication by 0,
leaving only the one determinant to multiply by the y basis vector,
giving a y vector that is parallel to the 2 projected vectors.
Thus the shortened form P[X] * D[Z] - P[Z] * D[X]
However, in working this out, I had my vectors in different places in the
matrix, and so I got P[Z] * D[X] - P[X] * D[Z] which should just be the opposite
sign of the calculation in code. Not really a worry, since it's just a vector
cross product.
The potential problem that I see is the test that uses this value:
/* Test if ray misses object's bounds. */
#if (r0 > Radius2) // Radius2 is xmax of the sor CP's
#local Result = false;
#else
If the sign of the vector cross product is negative, then that rejection test
will always fail, and the ray will always move on to have the intersection
tested. Which, if I'm interpreting all of this correctly, means that all of
the rays on one side of the sor always get fully evaluated for intersections,
this potentially making rendering slower than it needs to be.
Shouldn't we be using at least abs (r0) to account for P-cross-D AND D-cross-P?
In more detail:
First we translate and then normalize the ray direction vector.
Then we test the ray to see if it is above or below the sor
as well as to the left or right of the sor
starting at line 266
if (((D[Y] >= 0.0) && (P[Y] > Height2)) ||
((D[Y] <= 0.0) && (P[Y] < Height1)) ||
((D[X] >= 0.0) && (P[X] > Radius2)) ||
((D[X] <= 0.0) && (P[X] < -Radius2)))
{
return(false);
}
Line 266 checks if the ray direction is flat or points up, and the ray origin is
higher than the highest sor control point (Height2 = ymax)
So it will never intersect the rotated sor spline
This is OK
Line 267 checks if the ray direction is flat or points down, and the ray origin
is lower than the lowest sor control point (Height1 = ymin)
So it will never intersect the rotated sor spline
This is OK
Line 268 checks if the ray direction is straight or points right, and the ray
origin is to the right of the rightmost sor control point (Radius2 = xmax)
So it will never intersect the rotated sor spline
This is OK
Line 269 checks if the ray direction is straight or points left, and the ray
origin is to the left of the leftmost (rotated) sor control point (-Radius2 =
-xmax)
So it will never intersect the rotated sor spline
This is OK
BW: since this is before we do any projection, and we're only testing height and
width, can't we have a slanted ray that WOULD intersect the sor spline once it
got rotated around the y-axis?
Then we are doing a calculation that purports to be the DISTANCE between the ray
and the y-axis.
Working that out from first principles, it is the geometric problem of
determining the perpendicular distance (the shortest distance) between a point
and a line.
We simplify this by projecting onto 2D since the vertical angle of the ray makes
no difference at this point.
The vector cross product of 2 vectors gives us the area of the parallelogram
defined by those 2 vectors (just use those 2 vectors to make the remaining 2
sides)
The area is also equal to the base times the height of the parallelogram, and so
we solve for the height (H), which is the perpendicular - and therefore the
shortest distance between the point (y-axis in the xz plane, <0, 0, 0>) and the
line (the ray composed of origin and unit directional vector)
That gives us LENGTH (P-cross-D) = H times LENGTH (D)
Rearranging gives us H = LENGTH (P-cross-D) / LENGTH (D)
Now, in code, we have
r0 = P.x * D.z - P.z * D.x;
and that is only multiplied by the y unit basis vector,
so since there are no other dimensional units, this directly evaluates to the
length of the perpendicular y vector, and we don't have to do the expensive
square root of the sum of the squares.
a is the squared length of the direction vector
which, if non-zero, the vector cross product length gets divided by,
which should be the shortest, perpendicular length.
A few minor problems.
The ray direction vector already gets normalized at the beginning of
Sor_Intersect, so why are we calculating it's length again, and then checking if
it's more than zero, when at this point it should always be ONE.
Which bring up the potential divide-by-zero error when the normalization
calculation is done - and there is NO checking THERE!
And then there is the vector cross product sign issue.
So, after this gets rigorously checked, I'd suggest that
1. the ray direction vector length check gets moved to earlier in the code
2. we can do away with recalculating the length, checking for non-zero length,
and dividing the vector cross product length by a ray length which should
already always be 1.
3. Line 276 r0 = P[X] * D[Z] - P[Z] * D[X];
should be r0 = fabs(P[X] * D[Z] - P[Z] * D[X]);
so that the "length" is always positive.
- BE
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"giving a y vector that is parallel to the 2 projected vectors."
Clearly I meant to write perpendicular.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"BW: since this is before we do any projection, and we're only testing height
and
width, can't we have a slanted ray that WOULD intersect the sor spline once it
got rotated around the y-axis?"
This was meant to be deleted, after I had worked all that out.
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Bald Eagle" <cre### [at] netscapenet> wrote:
> MInvTransPoint(P, ray.Origin, Trans);
>
> MInvTransDirection(D, ray.Direction, Trans);
Now I can't really find if and where Trans gets defined as anything but an
Identity matrix in Line 776.
The sor gets created "at the origin" / around the y-axis,
so I'm now presuming that when we do
sor { ... translate <x, y, z>}
that the sor gets created and evaluated in its default position, and then all of
the results just get filtered through the translate transform as a
post-intersection process.
And if THAT's the case, then why do we have all of the transforms in the various
functions when we don't need them?
But then again, I could be missing something, and be completely wrong.
- BE
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Bald Eagle" <cre### [at] netscapenet> wrote:
> a is the squared length of the direction vector
> which, if non-zero, the vector cross product length gets divided by,
> which should be the shortest, perpendicular length.
a is the squared length of the PROJECTED direction vector
> A few minor problems.
> The ray direction vector already gets normalized at the beginning of
> Sor_Intersect, so why are we calculating it's length again, and then checking if
> it's more than zero, when at this point it should always be ONE.
Because although the RAY is normalized, it's PROJECTION isn't unit-length unless
it's parallel to the xz plane.
> Which bring up the potential divide-by-zero error when the normalization
> calculation is done - and there is NO checking THERE!
> And then there is the vector cross product sign issue.
>
> So, after this gets rigorously checked, I'd suggest that
> 1. the ray direction vector length check gets moved to earlier in the code
> 3. Line 276 r0 = P[X] * D[Z] - P[Z] * D[X];
> should be r0 = fabs(P[X] * D[Z] - P[Z] * D[X]);
> so that the "length" is always positive.
- BE
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Bald Eagle" <cre### [at] netscapenet> wrote:
> r0 = P.x * D.z - P.z * D.x;
> and that is only multiplied by the y unit basis vector,
> so since there are no other dimensional units, this directly evaluates to the
> length of the perpendicular y vector, and we don't have to do the expensive
> square root of the sum of the squares.
>
> a is the squared length of the [NORMALIZED and PROJECTED] direction vector
> which, if non-zero, the vector cross product length gets divided by,
> which should be the shortest, perpendicular length.
So what happens is that the "perp dot product" is essentially taking one vector,
rotating it counterclockwise by 90 degrees, and then taking the dot product,
which projects one vector onto the other.
This gives its projected length along the other vector.
And that's supposed to give the perpendicular, shortest distance between the
origin and the ray.
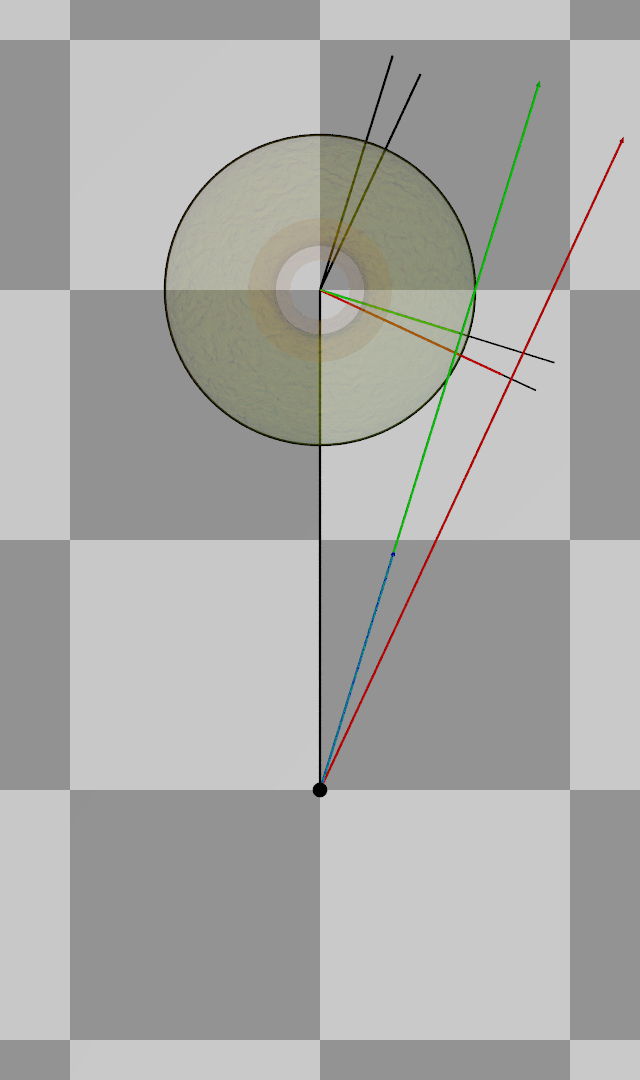
Diagrammatically, it's all looking good, but for some strange reason, the
perpendicular distance seems to be shorter than it should be, with the error
increasing the farther away the ray is.
- BW
If anyone has any ideas what the source of this error is, I'm all ears.
Post a reply to this message
Attachments:
Download 'sor_diagram1.png' (130 KB)
Preview of image 'sor_diagram1.png'

|
|
| |
| |
|
|
|
|
| |
| |
|
|
GOT IT.
OK, so I am pretty confident that I have the whole initial bounding-test section
of the code worked out.
And that has led me to prove that one problem I thought was happening IS
happening,
and
there's another issue that is taking place that might explain why sometimes some
of the segments fail to render.
> Diagrammatically, it's all looking good, but for some strange reason, the
> perpendicular distance seems to be shorter than it should be, with the error
> increasing the farther away the ray is. (*)
1. The rays that give a negative perpendicular dot product erroneously test as
hitting the bounding cylinder, and so a bunch of root solving gets done that
shouldn't be.
1a. The code tests a bounding cylinder that is based on the largest diameter of
the whole sor {}. But the sor {} is not so much a single object as it is a
stack of individual segments.
I believe that we ought to be testing intersection with each individual segment
to optimize the bounding tests.
2. The issue (*) above was a result of the ray direction being used as-is.
When I had an angled ray, the length was too large, and overly shortened my
perpendicular vector.
When I only used the ray projection onto the xz plane, all of my perpendicular
vectors were of the proper length.
2a. This too-short vector projection likely leads to false positives and causes
additional unnecessary root-finding.
So, I would like to propose 2 correction to this section of the sor {} source.
1. replace
D = ray.Direction;
with
D = <ray.Direction.x, 0, ray.Direction.z>;
and
2. replace
#if (r0 > Radius2)
with
#if (fabs(r0) > Radius2)
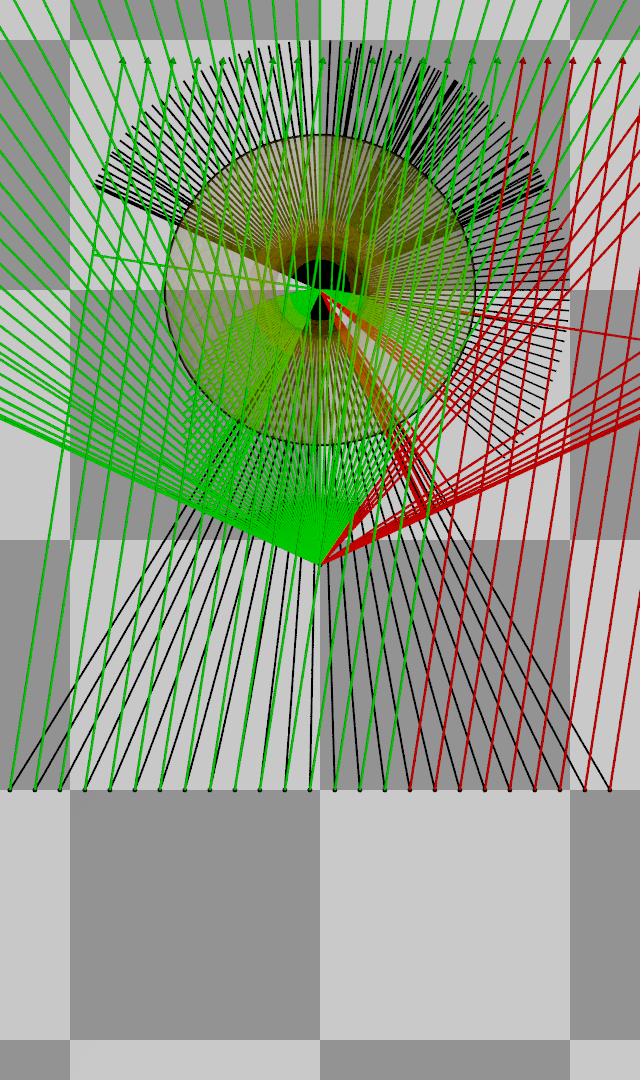
The attached diagram is a mess, but what we have is the sor {} circled in black
with the radius equal to the greatest x-value of the control points.
along the bottom, the ray origin changes, and the direction vector stays the
same, resulting in a sweep from left to right. As you can (hopefully) see, the
parallel lines change from green to red.
The green lines signify a successful _intersection test_ of the ray with the
bounding cylinder. The red are fails.
The thing to notice here is that only the misses to the right actually fail the
intersection test.
All of the rays on the left pass the test and go on to calculate the roots of
where the ray intersects the polynomial.
The fan shape above that is holding the ray origin fixed, while making the ray
direction go around in a circle 360 degrees.
The same false positive issue occurs.
Next post will fix that with fabs(r0)
Post a reply to this message
Attachments:
Download 'sor_diagram1.png' (524 KB)
Preview of image 'sor_diagram1.png'

|
|
| |
| |
|
|
|
|
| |
| |
|
|
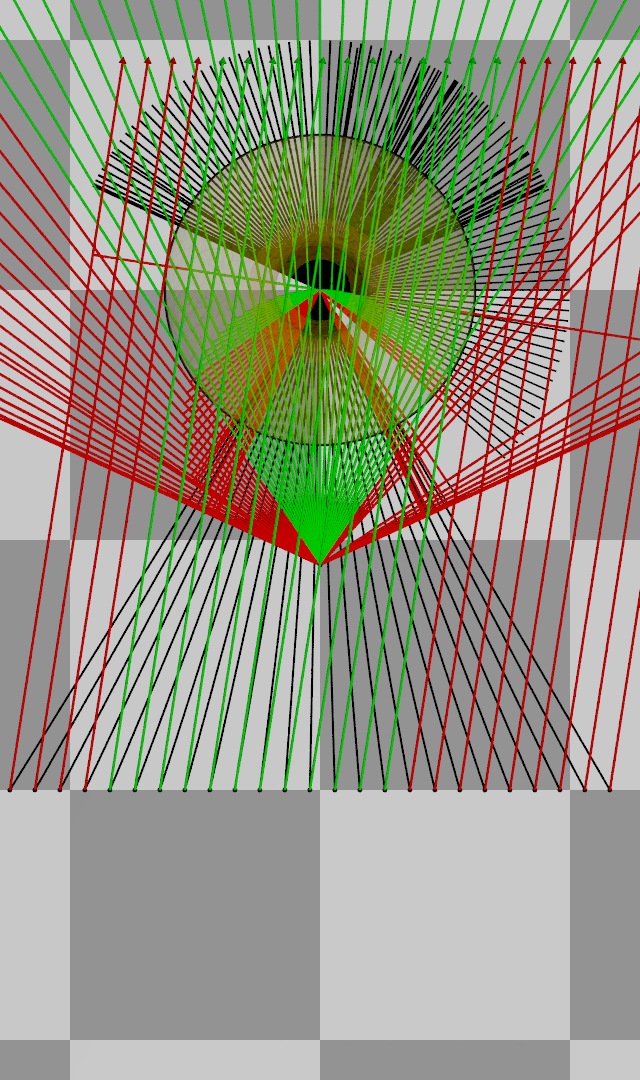
"Bald Eagle" <cre### [at] netscapenet> wrote:
> Next post will fix that with fabs(r0)
As you can see, there is a lot more red in this render, showing the removal of
erroneous bounding intersection positives, and the rays fail on both the left
and the right now, with only the rays that actually intersect the bounding
cylinder triggering the root-solving phase.
Post a reply to this message
Attachments:
Download 'sor_diagram1.png' (522 KB)
Preview of image 'sor_diagram1.png'

|
|
| |
| |
|
|
|
|
| |
| |
|
|
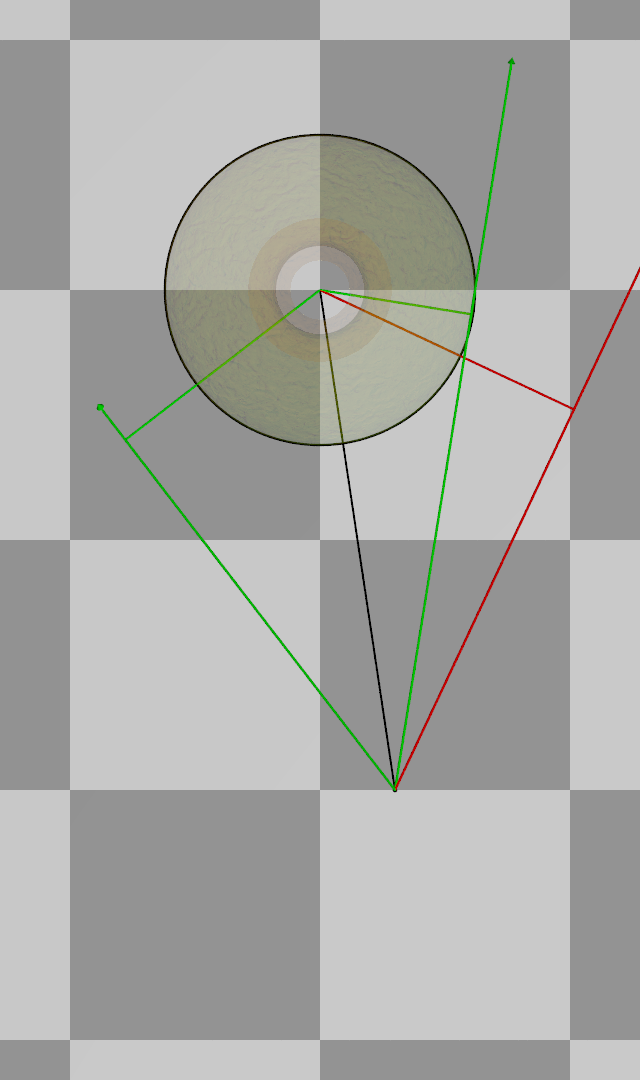
And here is a much simplified diagram showing only 3 rays, with all extraneous
lines removed.
Only the rays and the perpendicular distances are shown, color coded for
bounding intersection test state.
Post a reply to this message
Attachments:
Download 'sor_diagram1.png' (134 KB)
Preview of image 'sor_diagram1.png'

|
|
| |
| |
|
|
|
|
| |
| |
|
|
Desmos live graphing
Move the ray origin or the direction vector endpoint.
Very useful for working things out.
https://www.desmos.com/calculator/o50ybsmkw3
- BE
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
|
|