|
 |
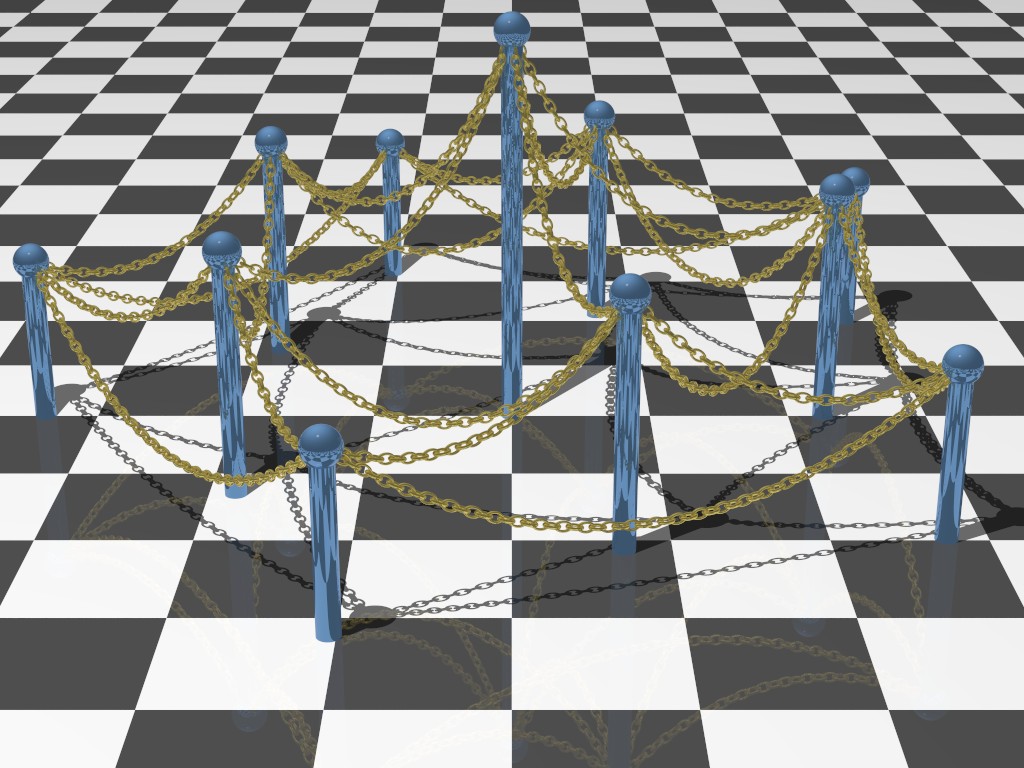
Here are a few positioning macros (and an iron link I borrowed from Chris
Colefax's Link.inc). The attached image is from a slightly different view
location & probably using links of a different size.
//-------------------------------------------------------------------------
// Persistence of Vision Ray Tracer Scene Description File
// File: Catenary.pov
// Vers: 3.6
// Desc: Catenaries between multiple poles arranged in polygons
// Date: 2005.07.30
// Auth: PM 2Ring
//
// -f +A0.4 +AM2 +R1
// -d +A0.2 +AM2 +R4
// -d +A0.1 +AM2 +R3
// -d +A0.05 +AM2 +R3
//
//Chain making macro
#include "Catenary.inc"
global_settings {
assumed_gamma 1.0
max_trace_level 25
}
//Textures ----------------------------------------
#declare Shiny =
finish{
phong .35 phong_size 320
ambient 0.1 diffuse 0.85 reflection 0.15
}
#declare TChain =
texture{
//pigment{rgb 1}
pigment{rgb <1, .8, .15>}
finish{Shiny metallic
diffuse 0.25 brilliance 7 reflection {0.55, .65 metallic}
}
}
#declare TTerminal =
texture{
//pigment{rgb 1}
pigment{rgb <.2, .5, 1>}
finish{
Shiny
reflection {0.35,.45 metallic} diffuse 0.4 brilliance 5
}
}
//-------------------------------------------------------------------------
//Link objects
#declare Torus1 = torus {.75, .175 scale 0.05*<1, 1, .65> texture{TChain}}
//From LinkObjs.inc by Chris Colefax
#declare Iron_Chain =
union {
torus {.7, .3 clipped_by {box {<-1, -.3, -1>, <0, .3, 1>}} translate -x *
.....6}
torus {.7, .3 clipped_by {box {<-1, -.3, -1>, <0, .3, 1>}} translate -x *
.....6 scale <-1, 1, 1>}
cylinder {-x*.6, x*.6, .3 translate z * .7}
cylinder {-x*.6, x*.6, .3 translate -z * .7}
pigment {rgb <.4, .4, .45>} normal {dents .6 scale .3} finish {phong .3
phong_size 10 metallic}
scale .035
}
//-------------------------------------------------------------------------
//Simple chain macro. Parameters: Start point,End Point. Make sure other
items are declared before calling!
#macro ChainQ(Start, End) Chain(Link, Start, End, Slack, Overlap, Twist)
#end
//#macro ChainQ(Start, End)#end //No Chains!
//Chain terminal post
#macro Terminal(Pos)
union{
sphere{Pos, PostRad*1.6}
cylinder{Pos*<1,0,1>, Pos-0.35*PostRad*y, PostRad}
pigment{rgb <.2, .5, 1>}
texture{TTerminal}
}
#end
//Chain, with terminal at start
#macro TermChain(Start, End)
Terminal(Start)
ChainQ(Start, End)
#end
//-Positioning
macros--------------------------------------------------------
//Connect all points in PosList with chain. Terminate if not a ring.
#macro MultiChain(PosList)
#local N=dimension_size(PosList,1);
#local I=0;
#while(I<N-1)
#local Start = PosList[I];
#local End = PosList[I+1];
TermChain(Start, End)
#local I=I+1;
#end
#if(vlength(End-PosList[0]))
Terminal(End)
#end
#end
//Connect all points in PosList to a centre post
#macro CenterChain(PosList)
#local N=dimension_size(PosList,1);
#local I=0;
#local End = <0, 1.25*Rad, 0>;
#while(I<N-1)
#local Start = PosList[I];
ChainQ(Start, End)
#local I=I+1;
#end
Terminal(End)
#end
//Connect all points in PosList0 to Poslist1, like threading shoelaces. No
error checking!
#macro ThreadChain(PosList0, PosList1)
#local N=dimension_size(PosList0,1);
#local I=0;
#while(I<N)
#local Start = PosList0[I];
#local End = PosList1[I];
ChainQ(Start, End)
#local Start = PosList0[mod(I+1,N)];
ChainQ(Start, End)
#local I=I+1;
#end
#end
// The scene ----------------------------------------
#declare Rad = 2.25;
//Link object
#declare Link = Torus1;
//#declare Link = Iron_Chain;
#declare Slack=1.35; // Slackness of the chain
#declare Overlap=1.60; //Link overlap
#declare Twist = 0; //Chain twist (in cycles)
#declare PostRad=.05; //Post radius
#declare MI = 5; //Polygon sides
#declare InRing = array[MI+1];
#declare OutRing = array[MI+1];
#declare I=0;
#declare DT=pi/MI;
#while (I<=MI)
#declare T = 2 * pi * I/MI;
#declare InRing[I] = Rad*<cos(T), 0.75, sin(T)>;
#declare OutRing[I] = 1.5*Rad*<cos(T+DT), .35, sin(T+DT)>;
#declare I=I+1;
#end
MultiChain(InRing)
#declare Slack = Slack / 1.1;
CenterChain(InRing)
#declare Slack = Slack / 1.1;
MultiChain(OutRing)
ThreadChain(InRing, OutRing)
//Simple room with checkered floor
#declare WS = 4*Rad;
box{<-1, -2/WS, -2>, <1, 3, 2> scale WS inverse pigment{gradient y scale
3.001*WS}}
box{<-1, -1/WS, -2>, <1, 0, 2> scale WS pigment{checker rgb 1,rgb
...05}finish{Shiny}}
camera {
location <1, 4.5, -10> * 1.25
look_at y*0.50
angle 30
}
light_source {<-2, 8, -3>*2 rgb 1}
// ----------------------------------------
Post a reply to this message
Attachments:
Download 'catenaryd1.jpg' (170 KB)
Preview of image 'catenaryd1.jpg'
|
|