|
 |
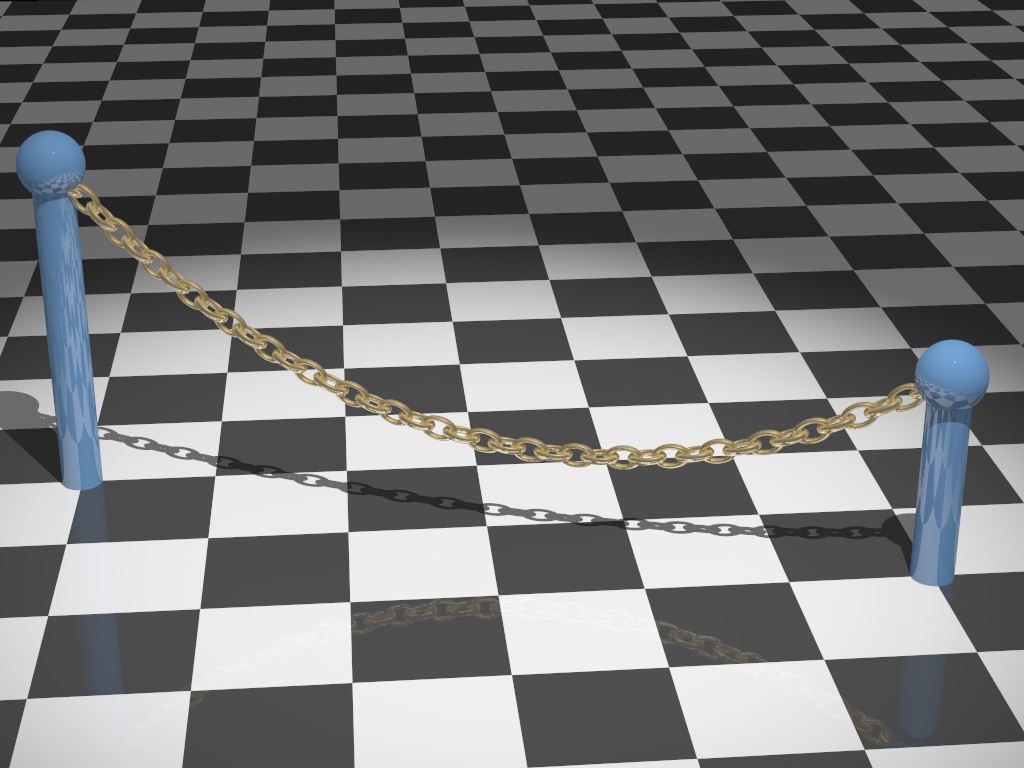
The catenary is the curve formed by a homogeneous chain suspended between
two points in a uniform gravity field. It looks like a parabola, but it's
mathematically quite different. The equation of a parabola is just
y = a*x*x, a simple quadratic, whereas a catenary is
y = a*cosh(x/a), a transcendental equation.
I had occasion to look at Chris Colefax's chain building code in "Linc.inc",
after referring a new user to it, and was dismayed to discover that Chris
used quadratics to build his chains. :(
The Chain() macro below constructs a true catenary. This is a preliminary
draft, so there are no docs as yet, sorry. Read the comments for hints. :)
Any questions and comments are most welcome. Have fun!
//-------------------------------------------------------------------------
// Persistence of Vision Ray Tracer Include File
// File: Catenary.inc
// Vers: 3.6
// Desc: Proper catenary chain.
// Date: 2005.07.30
// Auth: PM 2Ring
//
// Catenary parameter calculations thanks to Zdislav V. Kovarik. See below
//
//-------------------------------------------------------------------------
#ifndef(Catenary_Inc_Temp)
#declare Catenary_Inc_Temp=version;
#version 3.5;
#ifdef(View_POV_Include_Stack)
#debug "including Catenary.incn"
#end
//-------------------------------------------------------------------------
//
// From: kov### [at] mcmail cisMcMasterCA (Zdislav V. Kovarik)
// Subject: Re: Catenary
// Date: 5 Nov 1999 14:33:22 -0500
// Newsgroups: sci.math
// Keywords: fitting a catenary to match a suspended cable
//
// Upright catenary: y - y_0 = a * cosh((x - x_0)/a) , a > 0.
// The vertex is (x_0, y_0+a).
// The parameter a turns out to be the radius of curvature at the vertex.
// Remark: The radius of curvature at a point above x is
// a * (cosh((x-x_0)/a)^2.
//
// Problem: Parameters a, x_0, y_0 to be found so that the catenary arc
passes
// through (x_1, y_1), (x_2, y_2) and has length L between these points
// (provided L > sqrt((x_2 - x_1)^2 + (y_2 - y_1)^2) )
//
// The equations to be solved are (after some symmetrizing manipulation
// of the arclength integral)
//
// y_1 - y_0 = a * cosh ((x_1 - x_0)/a)
// y_2 - y_0 = a * cosh ((x_2 - x_0)/a)
// 2*a * cosh((x_1 + x_2 - 2*x_0)/(2*a)) * sinh((x_2 - x_1)/(2*a)) = L
//
// and it can be reduced to solving for one unknown at a time.
//
// First, we introduce an auxiliary unknown z which is to satisfy
//
// sinh(z) / z = sqrt(L^2 - (y_2 - y_1)^2) / abs(x_2 - x_1) , z > 0
//
// (the only transcendental non-elementary equation)
// and then the unknowns pop out:
//
// a = abs(x_2 - x_1) / (2*z)
// x_0 = (1/2)*(x_1 + x_2 - a * ln ((L + (y_2 - y_1)) / (L - (y_2 - y_1)))
// y_0 = (y_1 + y_2)/2 - (L/2) * coth(z).
//
//-------------------------------------------------------------------------
//Find B such that A=sinh(B)/B. Named in parallel to sinc()
#macro asinch(A)
#local B = sqrt(6*max(1e-4,A-1)); //1st approx, from sinh(B) = B +
B^3/3! + ...
#local B = asinh(A*B); //2nd approx, from sinh(B) = A*B
#local I = 0;
#while(I<8) //Newton's method
#local S = sinh(B);
#local C = B * cosh(B);
#local M = (A*B + C - 2*S) / (C - S);
#local B = B * M;
#local I = I + 1;
#if(abs(M-1)<1e-12) //bailout
#local I=8;
#end
#end
B //return value
#end
//Find width of an object's bounding box
#macro BBWidth(A) (max_extent(A) - min_extent(A)).x #end
//Make a catenary. Parameters: Link object, Start point,End Point,
//Slackness of the chain >1, Link overlap, Extra twist on whole cable
#macro Chain(Link, StartA, EndA, Slack, Overlap, Twist)
//Temporarily translate to origin & work in XY plane
#local End = EndA - StartA;
#local TH = degrees(atan2(End.z, End.x));
#local End = vrotate(End, y*TH); //Rotate to positive x-axis
//Find required chain length and number of links
#local Len = vlength(End) * Slack; //Basic chain length
#local LL = BBWidth(Link) / Overlap; //Link Length adjusted for
link overlap
#local Steps = 2*floor(.5*(.5+Len/LL)); //Round up to an even
integer number of links
#local Len = Steps * LL; //Adjusted chain length
//Find vertex of catenary that connects <0,0,0> & End, with length Len.
#local P = sqrt(Len*Len - End.y*End.y) / End.x;
#local Q = asinch(P);
#local A = End.x / (2*Q); //Catenary curvature
parameter.
#local X = A * ln((Len + End.y) / (Len - End.y));
#local Y = Len/tanh(Q);
#local V = (End - <X, Y, 0>)*.5; //Vertex
#local S1 = A*sinh(V.x/A); //Arclength at vertex
//Step evenly along catenary parametrized by arclength.
union {
#local I=1;
#while (I<Steps)
#local S = LL * I - S1; //Arclength from Vertex
#local M = S / A; //Slope of tangent
#local X = asinh(M);
#local Y = sqrt(1 + M*M);
object{
Link
rotate (90*mod(I+1,2) + Twist*360*(I-1)/(Steps-2))*x
rotate z*degrees(atan(M)) //Rotate parallel to tangent
translate V + A*<X, Y, 0>
}
#local I=I+1;
#end
//Transform back
rotate -y*TH
translate StartA
}
#end
#version Catenary_Inc_Temp;
#end
//-------------------------------------------------------------------------
//-------------------------------------------------------------------------
// Persistence of Vision Ray Tracer Scene Description File
// File: Catenary.pov
// Vers: 3.6
// Desc: Test Catenary include file
// Date: 2005.07.30
// Auth: PM 2Ring
//
// Catenary parameter calculations thanks to Zdislav V. Kovarik
// See Catenary.inc for details.
//
//-------------------------------------------------------------------------
//
// -f -A0.4 +AM2 +R1
// -d +A0.05 +AM2 +R3
//
#include "finish.inc"
#include "metals.inc"
//Chain making macro
#include "Catenary.inc"
global_settings {
assumed_gamma 1.0
max_trace_level 25
}
//-------------------------------------------------------------------------
//Simple chain macro. Parameters: Start point,End Point. Make sure other
items are declared before calling!
#macro ChainQ(Start, End) Chain(Link, Start, End, Slack, Overlap, Twist)
#end
//Chain terminal post
#macro Terminal(Pos)
union{
sphere{Pos, PostRad*1.6}
cylinder{Pos*<1,0,1>, Pos-0.35*PostRad*y, PostRad}
pigment{rgb <.2, .5, 1>}
finish{Glossy}
}
#end
//Chain, with terminal at start
#macro TermChain(Start, End)
Terminal(Start)
ChainQ(Start, End)
#end
//Link objects
#declare Torus = torus {.75, .175 scale 0.075*<1, 1, .65> }
#declare Torus1 = object {Torus scale 2 texture{T_Gold_2E} rotate 0*45*x}
//--- The scene -----------------------------------------------------------
#declare Rad = 2.0; //Scene size control
#declare PostRad= 0.150; //Post radius
//Chain parameters
#declare Link = Torus1; //Link object
#declare Slack = 1.12; //Slackness of the chain. (Length of
chain) / (straight distance between points)
#declare Overlap = 1.65; //Link overlap
#declare Twist = 0; //Chain twist (in cycles)
//Points to connect
#declare V1 = < 1.5*Rad, 0.75*Rad, 1>;
#declare V2 = <-1.5*Rad, 1.25*Rad, 3>;
//Do it!
TermChain(V1, V2)
Terminal(V2)
//Simple room with checkered floor
#declare WS = 5*Rad;
box{<-1, -2/WS, -2>, <1, 3, 2> scale WS inverse pigment{gradient y scale
3.001*WS}finish{Shiny}}
box{<-1, -1/WS, -2>, <1, 0, 2> scale WS pigment{checker rgb 1,rgb
....05}finish{Glossy diffuse 0.80}}
camera {
location <-0.5, 3.5, -5.5> * 0.93 * Rad
look_at y*2
right x*image_width/image_height up y
direction z
angle 30
}
light_source {<1, 9, -3>*Rad rgb 1 spotlight point_at z*2 falloff 16 radius
5 }
//------------------------------------------------------------------------- cisMcMasterCA (Zdislav V. Kovarik)
// Subject: Re: Catenary
// Date: 5 Nov 1999 14:33:22 -0500
// Newsgroups: sci.math
// Keywords: fitting a catenary to match a suspended cable
//
// Upright catenary: y - y_0 = a * cosh((x - x_0)/a) , a > 0.
// The vertex is (x_0, y_0+a).
// The parameter a turns out to be the radius of curvature at the vertex.
// Remark: The radius of curvature at a point above x is
// a * (cosh((x-x_0)/a)^2.
//
// Problem: Parameters a, x_0, y_0 to be found so that the catenary arc
passes
// through (x_1, y_1), (x_2, y_2) and has length L between these points
// (provided L > sqrt((x_2 - x_1)^2 + (y_2 - y_1)^2) )
//
// The equations to be solved are (after some symmetrizing manipulation
// of the arclength integral)
//
// y_1 - y_0 = a * cosh ((x_1 - x_0)/a)
// y_2 - y_0 = a * cosh ((x_2 - x_0)/a)
// 2*a * cosh((x_1 + x_2 - 2*x_0)/(2*a)) * sinh((x_2 - x_1)/(2*a)) = L
//
// and it can be reduced to solving for one unknown at a time.
//
// First, we introduce an auxiliary unknown z which is to satisfy
//
// sinh(z) / z = sqrt(L^2 - (y_2 - y_1)^2) / abs(x_2 - x_1) , z > 0
//
// (the only transcendental non-elementary equation)
// and then the unknowns pop out:
//
// a = abs(x_2 - x_1) / (2*z)
// x_0 = (1/2)*(x_1 + x_2 - a * ln ((L + (y_2 - y_1)) / (L - (y_2 - y_1)))
// y_0 = (y_1 + y_2)/2 - (L/2) * coth(z).
//
//-------------------------------------------------------------------------
//Find B such that A=sinh(B)/B. Named in parallel to sinc()
#macro asinch(A)
#local B = sqrt(6*max(1e-4,A-1)); //1st approx, from sinh(B) = B +
B^3/3! + ...
#local B = asinh(A*B); //2nd approx, from sinh(B) = A*B
#local I = 0;
#while(I<8) //Newton's method
#local S = sinh(B);
#local C = B * cosh(B);
#local M = (A*B + C - 2*S) / (C - S);
#local B = B * M;
#local I = I + 1;
#if(abs(M-1)<1e-12) //bailout
#local I=8;
#end
#end
B //return value
#end
//Find width of an object's bounding box
#macro BBWidth(A) (max_extent(A) - min_extent(A)).x #end
//Make a catenary. Parameters: Link object, Start point,End Point,
//Slackness of the chain >1, Link overlap, Extra twist on whole cable
#macro Chain(Link, StartA, EndA, Slack, Overlap, Twist)
//Temporarily translate to origin & work in XY plane
#local End = EndA - StartA;
#local TH = degrees(atan2(End.z, End.x));
#local End = vrotate(End, y*TH); //Rotate to positive x-axis
//Find required chain length and number of links
#local Len = vlength(End) * Slack; //Basic chain length
#local LL = BBWidth(Link) / Overlap; //Link Length adjusted for
link overlap
#local Steps = 2*floor(.5*(.5+Len/LL)); //Round up to an even
integer number of links
#local Len = Steps * LL; //Adjusted chain length
//Find vertex of catenary that connects <0,0,0> & End, with length Len.
#local P = sqrt(Len*Len - End.y*End.y) / End.x;
#local Q = asinch(P);
#local A = End.x / (2*Q); //Catenary curvature
parameter.
#local X = A * ln((Len + End.y) / (Len - End.y));
#local Y = Len/tanh(Q);
#local V = (End - <X, Y, 0>)*.5; //Vertex
#local S1 = A*sinh(V.x/A); //Arclength at vertex
//Step evenly along catenary parametrized by arclength.
union {
#local I=1;
#while (I<Steps)
#local S = LL * I - S1; //Arclength from Vertex
#local M = S / A; //Slope of tangent
#local X = asinh(M);
#local Y = sqrt(1 + M*M);
object{
Link
rotate (90*mod(I+1,2) + Twist*360*(I-1)/(Steps-2))*x
rotate z*degrees(atan(M)) //Rotate parallel to tangent
translate V + A*<X, Y, 0>
}
#local I=I+1;
#end
//Transform back
rotate -y*TH
translate StartA
}
#end
#version Catenary_Inc_Temp;
#end
//-------------------------------------------------------------------------
//-------------------------------------------------------------------------
// Persistence of Vision Ray Tracer Scene Description File
// File: Catenary.pov
// Vers: 3.6
// Desc: Test Catenary include file
// Date: 2005.07.30
// Auth: PM 2Ring
//
// Catenary parameter calculations thanks to Zdislav V. Kovarik
// See Catenary.inc for details.
//
//-------------------------------------------------------------------------
//
// -f -A0.4 +AM2 +R1
// -d +A0.05 +AM2 +R3
//
#include "finish.inc"
#include "metals.inc"
//Chain making macro
#include "Catenary.inc"
global_settings {
assumed_gamma 1.0
max_trace_level 25
}
//-------------------------------------------------------------------------
//Simple chain macro. Parameters: Start point,End Point. Make sure other
items are declared before calling!
#macro ChainQ(Start, End) Chain(Link, Start, End, Slack, Overlap, Twist)
#end
//Chain terminal post
#macro Terminal(Pos)
union{
sphere{Pos, PostRad*1.6}
cylinder{Pos*<1,0,1>, Pos-0.35*PostRad*y, PostRad}
pigment{rgb <.2, .5, 1>}
finish{Glossy}
}
#end
//Chain, with terminal at start
#macro TermChain(Start, End)
Terminal(Start)
ChainQ(Start, End)
#end
//Link objects
#declare Torus = torus {.75, .175 scale 0.075*<1, 1, .65> }
#declare Torus1 = object {Torus scale 2 texture{T_Gold_2E} rotate 0*45*x}
//--- The scene -----------------------------------------------------------
#declare Rad = 2.0; //Scene size control
#declare PostRad= 0.150; //Post radius
//Chain parameters
#declare Link = Torus1; //Link object
#declare Slack = 1.12; //Slackness of the chain. (Length of
chain) / (straight distance between points)
#declare Overlap = 1.65; //Link overlap
#declare Twist = 0; //Chain twist (in cycles)
//Points to connect
#declare V1 = < 1.5*Rad, 0.75*Rad, 1>;
#declare V2 = <-1.5*Rad, 1.25*Rad, 3>;
//Do it!
TermChain(V1, V2)
Terminal(V2)
//Simple room with checkered floor
#declare WS = 5*Rad;
box{<-1, -2/WS, -2>, <1, 3, 2> scale WS inverse pigment{gradient y scale
3.001*WS}finish{Shiny}}
box{<-1, -1/WS, -2>, <1, 0, 2> scale WS pigment{checker rgb 1,rgb
....05}finish{Glossy diffuse 0.80}}
camera {
location <-0.5, 3.5, -5.5> * 0.93 * Rad
look_at y*2
right x*image_width/image_height up y
direction z
angle 30
}
light_source {<1, 9, -3>*Rad rgb 1 spotlight point_at z*2 falloff 16 radius
5 }
//-------------------------------------------------------------------------
Post a reply to this message
Attachments:
Download 'catenaryf2.jpg' (100 KB)
Preview of image 'catenaryf2.jpg'

|
|