 |
|
|
|
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Thomas de Groot wrote:
> "H. Karsten" <h-karsten()web.de> schreef in bericht
> news:web.4b00e7f6234deab6da6353d60@news.povray.org...
>> The first, but main part of the upper leg. The legs in the ape-preview are
>> just
>> copies of the arms. I like to have something different.
>>
> Of course you do! :-)
>
> Awesome work.
>
> Thomas
>
>
I agree :)
--
Best Regards,
Stephen
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
> The first, but main part of the upper leg. The legs in the ape-preview are just
> copies of the arms. I like to have something different.
>
> Holger
>
>
>
>
> ------------------------------------------------------------------------
>
It looks a LOT stronger then the arms :)
You're doing fine.
Alain
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
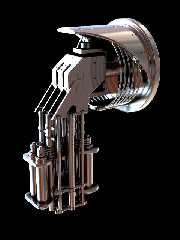
OK, today just the hip joint and a view holes, but I'va played a little with the
texture. Its a blurred reflection with a projection overlay in mc-pov.
Looks like this:
//###########################
texture{pigment{color rgb 0}
finish{reflection {0,1} montecarlo{mc_reflect{1 1 1 750}}}}
texture{pigment{
projection{object{M}normal on blur .1,1}
color_map{
[0 color rgbt <0,0,0,1>]
[1 color rgbt 0]
}}
finish{ambient 0 reflection 0}
}
//##########################
object{M} in the second layer is the collection of all objects in the scene.
Post a reply to this message
Attachments:
Download 'u-leg02.jpg' (49 KB)
Preview of image 'u-leg02.jpg'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
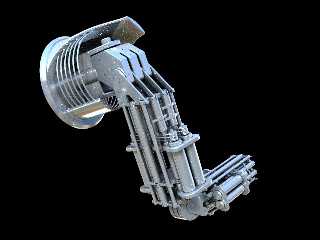
The daily update. Ok, I cheated - the lower leg is a copy of the upper one but I
think it looks nice.
The problem is, the I have a few nice ideas for the foot and I like to start
with it. If I'm getting bored by the lower leg I'll change it, but in the moment
it seams to be OK for me.
Holger
Post a reply to this message
Attachments:
Download 'u-leg03.jpg' (48 KB)
Preview of image 'u-leg03.jpg'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"H. Karsten" <h-karsten()web.de> schreef in bericht
news:web.4b043f6c234deab6da6353d60@news.povray.org...
> The daily update. Ok, I cheated - the lower leg is a copy of the upper one
> but I
> think it looks nice.
> The problem is, the I have a few nice ideas for the foot and I like to
> start
> with it. If I'm getting bored by the lower leg I'll change it, but in the
> moment
> it seams to be OK for me.
>
> Holger
>
Strong and efficient. Waiting for the foot....
Thomas
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
OK, there is no connection between the leg and the food. The problem is, that my
CAD-program becomes more and more problems to show all triangles of the surfaces
- its to much... I was not able to see the result on the CAD-side.
So the rendering was a little surprise for me too. I have to isolate the
geometry and bring it together, when everything is made.
I guess that I have other surprises then...
Anyway - I'll finish the food today and try to finish the whole character over
the weekend.
Can't wait to animate it ;)
Holger
Post a reply to this message
Attachments:
Download 'u-leg04.jpg' (47 KB)
Preview of image 'u-leg04.jpg'
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"H. Karsten" <h-karsten()web.de> schreef in bericht
news:web.4b06cef0234deab6da6353d60@news.povray.org...
> OK, there is no connection between the leg and the food. The problem is,
> that my
> CAD-program becomes more and more problems to show all triangles of the
> surfaces
> - its to much... I was not able to see the result on the CAD-side.
>
> So the rendering was a little surprise for me too. I have to isolate the
> geometry and bring it together, when everything is made.
>
> I guess that I have other surprises then...
>
> Anyway - I'll finish the food today and try to finish the whole character
> over
> the weekend.
>
> Can't wait to animate it ;)
>
If I may give one little piece of advice: The foot seems to short to me.
Considering the bulk of the complete robot, it needs larger feet in order to
remain stable and move easily. Of course, the robot probably has gyroscopes
inside, but to look credible those feet need a larger scale imo.
Thomas
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
"Thomas de Groot" <tDOTdegroot@interDOTnlANOTHERDOTnet> wrote:
....
> If I may give one little piece of advice: The foot seems to short to me.
> Considering the bulk of the complete robot, it needs larger feet in order to
> remain stable and move easily. Of course, the robot probably has gyroscopes
> inside, but to look credible those feet need a larger scale imo.
>
> Thomas
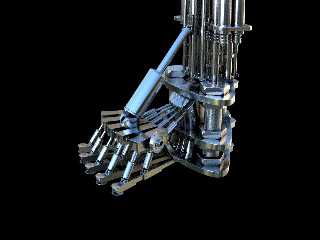
You're maybe right. When I put all things together, I should test it and rescale
the foot if necessary.
Thanx :)
Here the hydraulics version.
Holger
Post a reply to this message
Attachments:
Download 'u-leg05.jpg' (39 KB)
Preview of image 'u-leg05.jpg'

|
|
| |
| |
|
|
|
|
| |
| |
|
|
H. Karsten wrote:
> "Thomas de Groot" <tDOTdegroot@interDOTnlANOTHERDOTnet> wrote:
> .....
>
> You're maybe right. When I put all things together, I should test it and rescale
> the foot if necessary.
>
> Thanx :)
>
> Here the hydraulics version.
>
Hi Holger,
It is looking better and better :) but do you really need 5 toes in the
foot? I think 3 would do for stability if the end of the lower leg acted
as a heal. And it would move it up the unnatural valley IMO.
--
Best Regards,
Stephen
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |
| |
|
|
Stephen wrote:
And it would move it up the unnatural valley IMO.
Oops! Uncanny valley ;)
--
Best Regards,
Stephen
Post a reply to this message
|
|
| |
| |
|
|
|
|
| |





