|
 |
On 03/30/2018 08:21 AM, William F Pokorny wrote:
> ....
Sturm / polysove() investigation. Other solvers. Root polishing.
I've continue to look at the root solvers over the past month. At a good
place to write another post about findings and changes.
A couple preliminaries before the main topic.
First, while most results are better, the polynomialsolverAccuracy
branch still lacks planned updates. For example, scenes with lathes and
sphere_sweeps using orthographic cameras currently render with more
artifacts, not less.
Second, this set of commits updates the solve_quadratic function in a
way both more accurate and faster.
---
The main topic is root finding tolerance and scaling.
All the solvers find roots / surface intersections to some tolerance.
They do this in a coordinate space which has been normalized with
respect all scene transforms. Additionally, objects like blobs
internally normalized to internal 'unit' coordinate spaces.
Suppose in the solver coordinate space a ray/surface equation has a root
essentially at the ray origin - at distance 0.0 - as happens with self
shadowing rays. All solvers due their tolerances have the potential to
allow such near-zero roots to drift into the >0.0 value space as
ray-surface intersections. This numerical reality is why objects filter
roots to a minimum returned intersection depth larger than zero(1).
Further, this minimum returned intersection depth must account for the
translation of every root and its tolerance back into the original
coordinate space. A wrongly positive 1e-8 root in solver space is a much
more positive 1e-4 root after a scale up by 10000. The solvers each have
different tolerances. There are many shape custom 'solvers' in use
beyond those I've been working upon and differing internal
normalizations. Why we've got many differing returned depth values. Why
blob's have long used a minimum returned intersection depth of 1e-2
while a sphere, for example, uses 1e-6.
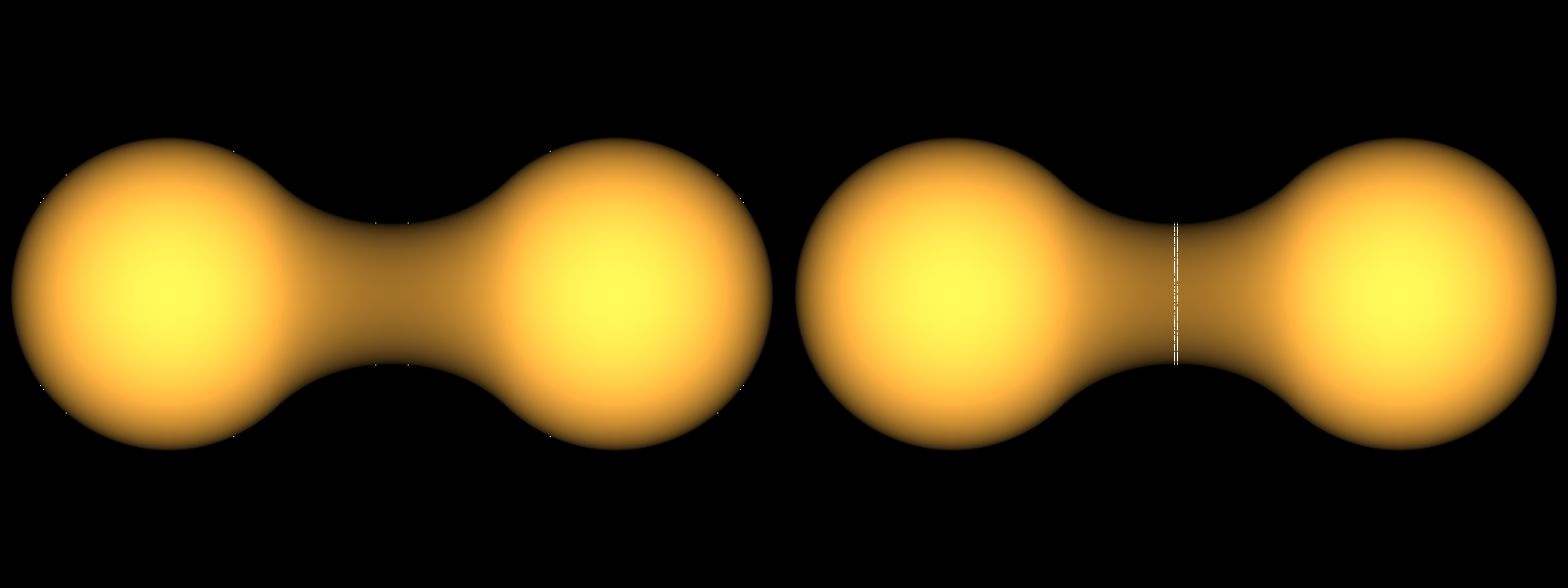
It's the case that even blob's large 1e-2 filtering value is inadequate
given solve_quartic()'s tolerance is relatively large. Continuing to use
Gail Shaw's blob scene from 2005 to demonstrate, the attached image was
rendered with the current 3.8 master branch without sturm - so using
solve_quartic(). The original scene render is on the left. On the right
is the same scene scaled up by 10000. The vertical bars showing up on
the right happen due slightly ~=0.0 roots drifting positive in
solve_quartic(). The wrongly positive roots are then scaled up to a
value greater than the current 1e-2 small root/intersection depth
filter. Not being filtered, the roots corrupt results.
While zero crossing roots due tolerance are the most serious tolerance
multiplied by scale issue, roots well positive can drift quite a lot too
in the global space where the scale up is large.
The improvement adopted for the solve_quartic() and polysolve()/sturm
solvers - where 'scaled tolerance' issues have been seen - was to add a
Newton-Raphson root polishing step to each. With blobs this looks to
allow a returned depth on the order of 4e-8 over 1e-2 for a 1e-7 to 1e7
global working range at DBL = 'double'.
Aside for thought: Might we be able to determine when we are evaluating
a self-shadowing or same-shape-terminating ray-surface equation? If so,
it should be we can use the knowledge we have a root 'at 0.0' to always
deflate / reduce the order of these polynomials prior to finding roots.
Updates at:
https://github.com/wfpokorny/povray/tree/fix/polynomialsolverAccuracy
Performance and specific commit details below.
Bill P.
(1) - The idea of going as small as >0.0 in each shape's implementation
fly is not presently possible. Trying instead a new much smaller
MIN_ISECT_DEPTH_RETURNED value - see commit comments.
Performance info:
------------ /usr/bin/time povray -j -wt1 -fn -p -d -c lemonSturm.pov
0) master 30.22user 0.04system 0:30.89elapsed
19) 4e16623 14.94user 0.01system 0:15.56elapsed -50.56%
20) 0d66160 15.22user 0.03system 0:15.80elapsed +1.87%
(hilbert_curve linear sphere_sweep
scene with new solve_quadratic()) (-7.5%)
21) 761dd0b 15.05user 0.04system 0:15.71elapsed -1.12%
22) 552b625 (quartic polish non-sturm lemon scene) (+0.82%)
23) 63e0456 15.16user 0.02system 0:15.76elapsed +1.20%
24) ec28851 NA Code documentation only.
25) 8962513 15.43user 0.02system 0:16.05elapsed +1.78% -48.94%
(quartic polish non-sturm lemon scene) (+1.02% +2.70%)
19) Removing leading, near zero coefficient reduction in Solve_Polynomial().
Leading coefficients of < SMALL_ENOUGH (1e-10) were being dropped
reducing the order of the incoming polynomial when the near zero values
had meaning with respect to roots. Led to both false roots and missed roots.
20) New zero coefficient stripping and solve_quadratic implementation.
General effort to implement better 'effective zero' coefficient
handling. Created new POV_DBL_EPSILON macro value which is 2x the C++
standards <float type>_EPSILON value and updated PRECISE_EPSILON to be
2x the single bit epsilon as well.
Zero filtering in polysolve now looks at all polynomial coefficients and
either sets 'effective zeros' to exactly 0.0 or strips them if they are
leading coefficients.
The much more accurate near zero coefficients drove the need for a
better solve_quadratic implementation included with this commit. Note it
supports the PRECISE_FLOAT options like polysolve.
Zero filtering in solve_quadratic, solve_cubic and solve_quartic now
standardized both in implementation and use of POV_DBL_EPSILON.
21) Created new constexpr DBL variable MIN_ISECT_DEPTH_RETURNED.
Near term need to use a value not MIN_ISECT_DEPTH in blob.cpp to test
Jérôme's github pull request #358. Longer term aim is to drive all
returned intersection depths from shape code to
MIN_ISECT_DEPTH_RETURNED. The value is automatically derived from DBL
setting and at double resolves to about 4.44089e-08. On the order of the
square root of POV_DBL_EPSILON.
Moving blob.cpp's inside test value INSIDE_TOLERANCE to POV_DBL_EPSILON
over previous recent re-calculation. Over time plan is to move EPSILONs
best nearer a double's step to POV_DBL_EPSILON.
Cleaning up doxygen documentation added during recent solver related
updates.
22) Adding root polishing step to solve_quartic function.
Newton-Raphson step added to polish initial roots found by the
solve_quartic function. The core solve_quartic tolerance allows roots to
drift from <=0.0 to >0.0 values with the latter causing artifacts and
additional root filtering. This the reason for the long too large 1e-2
intersection depth value in blob.cpp now reduced to
MIN_ISECT_DEPTH_RETURNED.
As part of this change created a new FUDGE_FACTOR4(1e-8) constant DBL
value to replace previous use of SMALL_ENOUGH(1e-10) within
solve_quartic. Looks like the value had been smaller to make roots more
accurate, but at the cost of missing roots in some difficult equation
cases. With the root polishing can move back to a larger value so as to
always get roots. Yes, this better addresses most of what the already
remove difficult_coeffs() function and bump into polysolve was trying to do.
23) Adding root polishing step to polysolve function.
24) Cleaning up a few comments and doxygen documentation.
25) Moving to more conservative root polishing implementations.
Post a reply to this message
Attachments:
Download 'tolerancestory.png' (97 KB)
Preview of image 'tolerancestory.png'
|
|