|
 |
On 05/18/2018 10:16 PM, clipka wrote:
> Am 18.05.2018 um 19:00 schrieb William F Pokorny:
>
>> Chrisoph added this bit of code in blob.cpp to avoid visible seams:
>>
>> DBL depthTolerance = (ray.IsSubsurfaceRay()? 0 : DEPTH_TOLERANCE);
>>
>> I've been running with DEPTH_TOLERANCE at 1e-4 for a long time in my
>> personal version of POV-Ray which fixes all the blob accuracy issues
>> except for the subsurface one.
Formally a blob's 'DEPTH_TOLERANCE' value was used for both the returned
from ray origin intersection tolerance and the internal
determine_influences() 'mind_dist' tolerances - though they control
different things. The internal sub-element influences mechanism now uses
>0.0. Should have always I believe except it does sometimes create
slightly more difficult ray-surface equations - which is my bet for why
the original v1.0 code didn't.
>
> For subsurface rays it's safer to keep it at exactly 0.
>
> The `depthTolerance` mechanism, to all of my knowledge, is in there to
> make sure that transmitted, reflected or shadow rays don't pick up the
> original surface again.
>
It depends about which intersection depth tolerance you speak. There are
variations of the mechanism.
a) What you say is close to my understanding for the continued and
shadow ray mechanisms which exists outside the code for each shape.
These mechanisms live in the 'ray tracing' code. I'd slightly reword
what you wrote to say these mechanisms prevent the use of ray - surface
intersections within some distance of a previous intersection. This
distance is today usually SMALL_TOLERANCE or 1e-3. SHADOW_TOLERANCE has
also been 1e-3 for more than 25 years and was only every something
different because Enzmann's initial solvers had a hard coded shadow ray
filter at a larger the SMALL_TOLERANCE value. There is too
MIN_ISECT_DEPTH.
b) Root / intersection depth tolerance filters exist in the code for
each shape/surface too. These control only whether all roots /
intersections for the shape are greater than a minimum intersection
depth relative to the incoming ray's origin or less than MAX_DISTANCE.
They do not control how closely ray surface intersections are spaced
from each other(1)(2). True the shape depth tolerance can influence
continued or shadow ray handling as seen by being 'different' than those
used in (a). However, we should aim for (b) <= (a) depth tolerance
alignment.
On seeing your subsurface code running the (b) variety at >0.0. I had
the thought, why not do this with all shapes / surfaces? Let (a) filter
the roots for its need. This would get us closer to a place where we'd
be able to make SMALL_TOLERANCE & MIN_ISECT_DEPTH smaller so people
don't have to so often do the ugly scale up their scene trick. There is
no numerical reason we cannot support generally much smaller scene
dimensions than we do.
Well it turns out returning all the roots >0.0 in each shapes (b)
mechanism costs cpu time - about 1% of a 3% increase with the internal
blob influence min_dist change for a glass blob scene. Time is saved
where intersections which (a) would have to filter later are just never
returned by (b). This experiment is why I set blob.cpp's DEPTH_TOLERANCE
= MIN_ISECT_DEPTH - which only happens also be the 1e-4 I've long been
using. I currently think the (b) depth for each shape / surface should
be migrated to MIN_ISECT_DEPTH over time.
(1) - I expect CSG generally needs all the roots regardless of spacing,
but this is code I've never reviewed.
(2) - Mostly true for what I've seen. But who knows, might be other
inbuilt shape, surface implementations do spacial root filtering for
internal reasons. The sphere_sweep's code seems to be doing a sort of a
root correction thing - with which you are far more familiar than me.
> This problem is absent in rays earmarked as subsurface rays (presuming
> we have high enough precision) because such rays are never shot directly
> from the original intersection point, but a point translated slightly
> into the object. So subsurface rays already carry an implicit
> depthTolerance with them.
>
I tested subsurface scenes with my updates and believe the changes are
compatible without the need for the returned depth to be >0.0. Thinking
about it another way, if the 'returned' min depth needed to be >0.0 for
subsurface to work, all shapes would need that conditional for >0.0 and
this is not the case. Believe we're good, but we can fix things if not.
>> It could be adjusted so as to push more solve_quartic rays into sturm /
>> polysolve, but it's aleady the case most difficult-coefficient rays are
>> unnecessarily run in sturm / polysolve when solve_quartic would work
>> just fine. The right thing to do is let users decide when to use 'sturm'
>> and this set of commit dumps the difficult_coeffs() code.
>
> Would it make sense to, rather than ditching the test entirely, instead
> have it trigger a warning after the render (akin to the isosurfaces
> max_gradient info messages) informing the user that /if/ they are seeing
> artifacts with the object they may want to turn on sturm (provided of
> course sturm is off)?
>
We should think about it, but currently I answer no to your specific
question. The difficult coefficient method is wildly inaccurate in
practice unlike the warning with isosurfaces.
A warning would be good if we can figure out something better... Mostly
it will be obvious - and more often obvious with this update. If running
blobs and you see speckles / noise - try sturm. Advice good today by the
way. Advice I should have taken with my own potential glow scene over
extreme AA - but the code dropped hid much of the solve_quartic issue
from me and I thought media the cause.
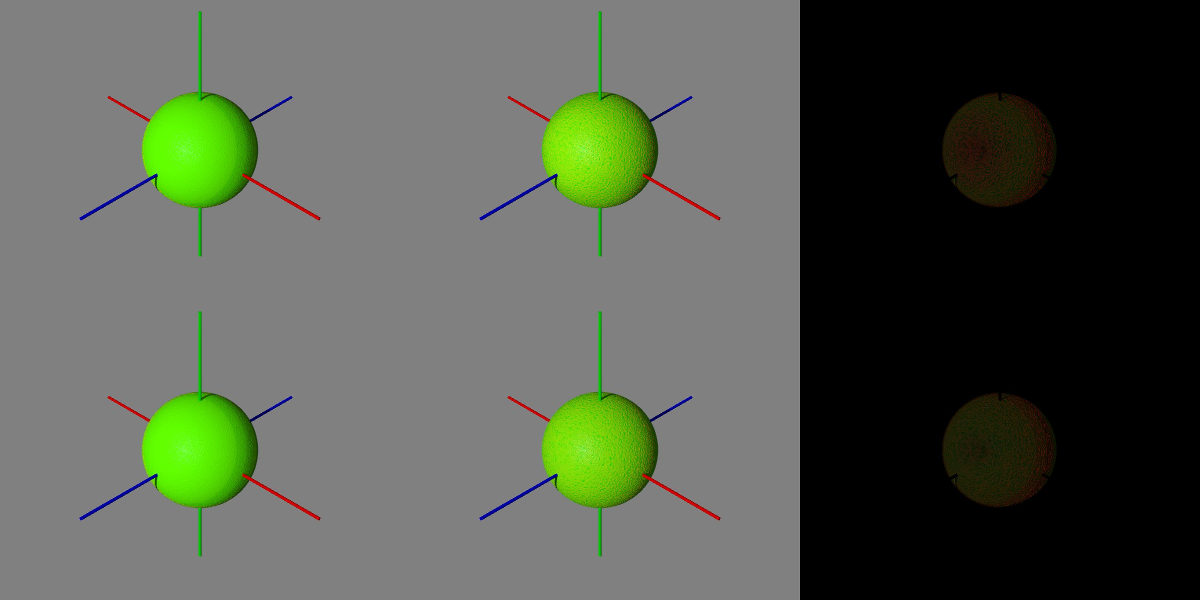
I ran test scenes where knowing you need sturm is pretty much impossible
to see without trying sturm and comparing images. For example, attached
is an image where I was aiming for a fruit looking thing with a faked
subsurface effect using multiple concentric blobs positive and negative
- taking advantage of blob's texture blending.
In the left column we see the <= master (3.8) current result where the
internal blob surfaces are not accurately resolved. The right column
shows the difference between column 1 and 2 for each row.
The top row, middle shows the new all solve_quartic() solution which in
fact has bad roots on a surface internal to the outer ones. Negative
blobs in addition to tiny thresholds tend to trip the solve_quartic
failures. We cannot 'see' we've got bad roots... The bottom row is the
accurate - though it happens less attractive - sturm result.
Reasonable accurate warnings would be good. Wonder if there is a way to
pick the issue up in solve_quartic itself or in blob.cpp knowing sturm
not set....
Bill P.
Post a reply to this message
Attachments:
Download 'diffcoeffhidden.png' (160 KB)
Preview of image 'diffcoeffhidden.png'
|
|